

水下仿生機器魚的設(shè)計與研究
“優(yōu)秀設(shè)計”一等獎
資助企業(yè):
 上海智能制造功能平臺有限公司
上海智能制造功能平臺有限公司
資助年份: 2021
企業(yè)導(dǎo)師: 邵鑫

指導(dǎo)教師: 陳根良
項目成員: 趙思蒙,劉嘉樂,秦川,趙顯文
 項目海報
項目海報


 項目視頻
項目簡介
項目視頻
項目簡介
項目概述
海洋資源豐富,還有許多領(lǐng)域未曾探索,水下環(huán)境未知且復(fù)雜,探索開發(fā)難度大。技術(shù)落后導(dǎo)致開發(fā)時產(chǎn)生嚴(yán)重污染和環(huán)境破壞。水下機器人技術(shù)是海洋資源開發(fā)利用的基礎(chǔ),其中仿生機器魚便是水下機器人中重要的一類,是未來水下機器人發(fā)展的一個重要方向。本小組基于鲹科魚的運動模式,設(shè)計了一款水下仿生機器魚。通過彈性板和自主設(shè)計的驅(qū)動機構(gòu)可以實現(xiàn)機器魚的高度仿生運動。同時,借助胸鰭和重心調(diào)節(jié)機構(gòu),仿生機器魚可以實現(xiàn)水下的姿態(tài)調(diào)整。
項目目標(biāo)
本項目以鲹科魚為放生對象,目標(biāo)是通過彈性板變形運動來擬合現(xiàn)實中魚類游動時魚體的運動函數(shù),并附加姿態(tài)調(diào)整功能。
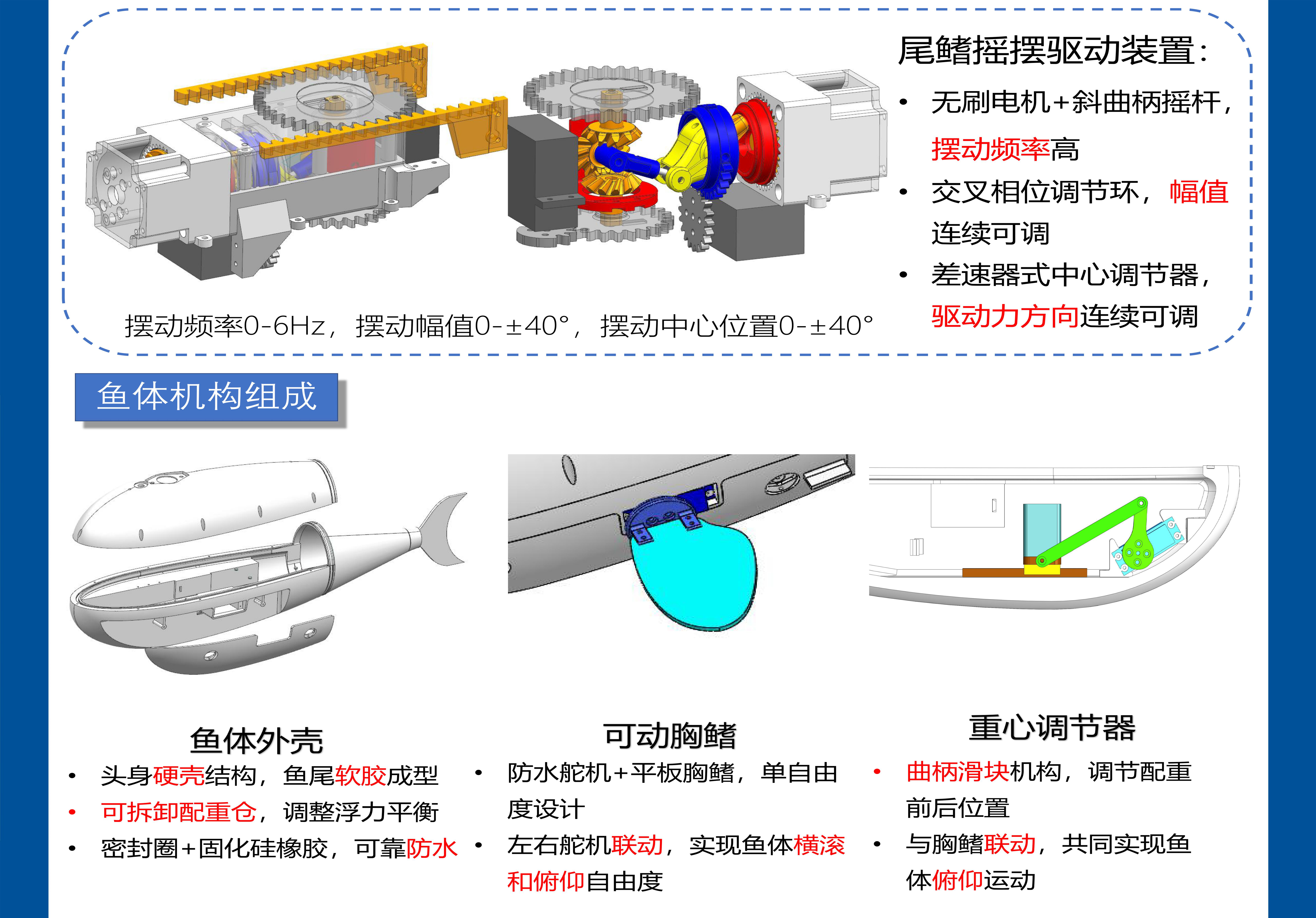
為了達(dá)到高效的驅(qū)動,本項目還設(shè)計研發(fā)了一款集成化的驅(qū)動機構(gòu),該機構(gòu)可以實現(xiàn)多幅值,多頻率,多中心位置的擺動輸出,優(yōu)化了驅(qū)動效率。
完成的仿生魚可以作為載體,搭載各類探測器進行水下勘探工作。
項目成果
研發(fā)了一套集成化的高效驅(qū)動裝置,可以控制魚尾實現(xiàn)不同幅值,不同頻率,不同中心位置的擺動,實現(xiàn)了放生機器魚加減速,轉(zhuǎn)向的功能。
基于彈性板變形理論,根據(jù)實際魚類的運動函數(shù)反解出了彈性板的設(shè)計尺寸和運動輸入,這使得彈性板的變形運動和現(xiàn)實中魚類的魚尾擺動高度擬合。
仿生機器魚在水下具有良好的密封性,且可以調(diào)整姿態(tài)實現(xiàn)翻轉(zhuǎn),俯仰等功能。
對魚體進行了三維建模和流體體仿真,優(yōu)化了實物樣機的幾何尺寸和運動模式。




