

動(dòng)物腦機(jī)接口的快速埋植系統(tǒng)設(shè)計(jì)與開發(fā)
“優(yōu)秀設(shè)計(jì)”二等獎(jiǎng)
資助企業(yè):
 海安上海交通大學(xué)智能裝備研究院
海安上海交通大學(xué)智能裝備研究院
資助年份: 2021
企業(yè)導(dǎo)師: 周恩權(quán)

指導(dǎo)教師: 盛鑫軍
項(xiàng)目成員: 韓博,高冰鑒,崔燦燦,吳宇峻
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
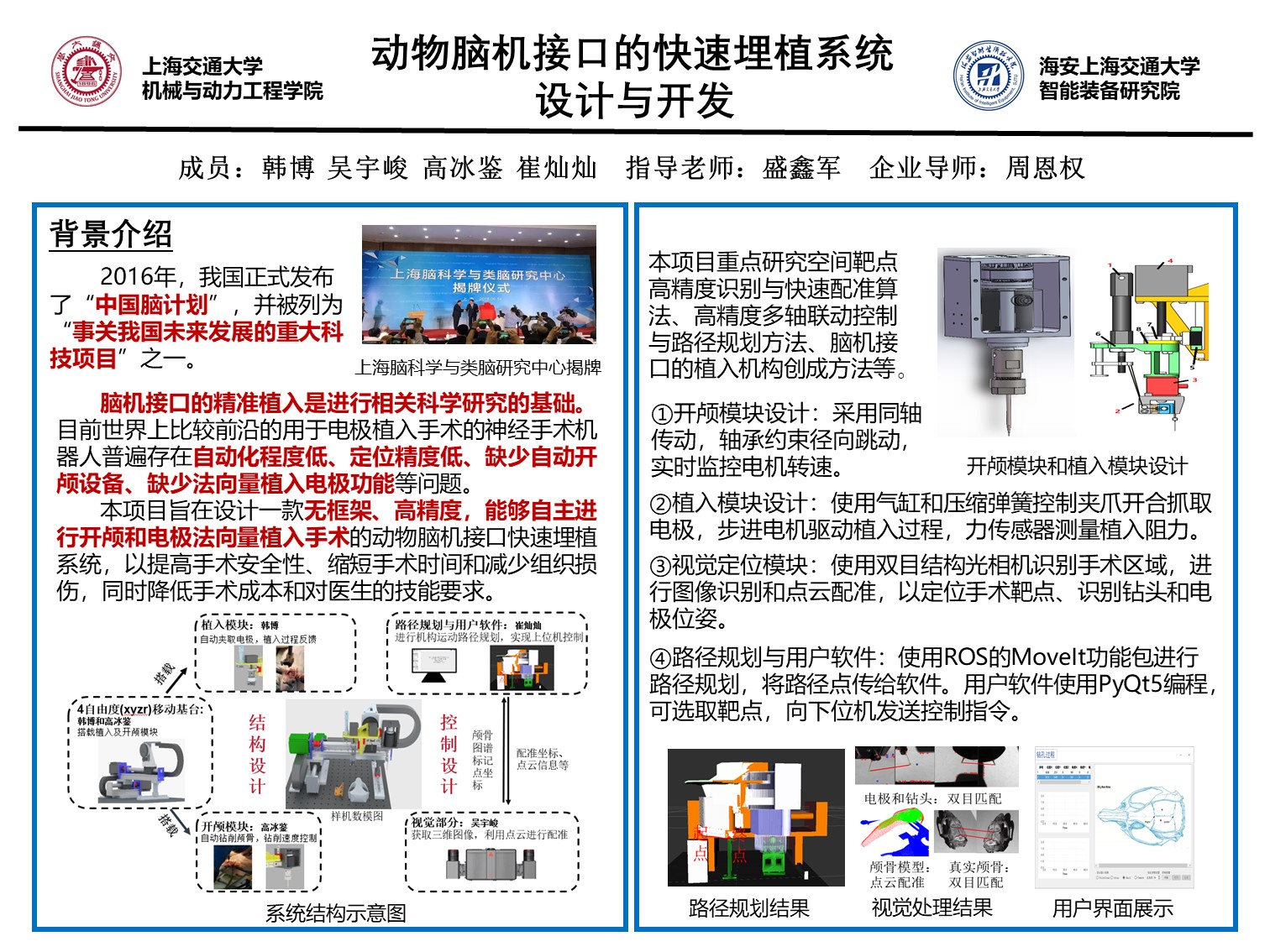
目前世界上比較前沿的用于電極植入手術(shù)的神經(jīng)手術(shù)機(jī)器人普遍存在自動(dòng)化程度低、定位精度低、缺少自動(dòng)開顱設(shè)備、缺少法向量植入電極功能等問(wèn)題。本項(xiàng)目旨在設(shè)計(jì)一款無(wú)框架、高精度,能夠自主進(jìn)行開顱和電極法向量植入手術(shù)的動(dòng)物腦機(jī)接口快速埋植系統(tǒng),以提高手術(shù)安全性、縮短手術(shù)時(shí)間和減少組織損傷,同時(shí)降低手術(shù)成本和對(duì)醫(yī)生的技能要求,為日后研發(fā)適用于其他動(dòng)物與人類的腦機(jī)接口埋植系統(tǒng)提供參考。
項(xiàng)目目標(biāo)
1. 研究高精度、高安全性、高靈活性的傳動(dòng)機(jī)構(gòu)、開顱模塊和快速植入模塊,達(dá)到快速且可靠的植入要求。
2. 構(gòu)建基于視覺(jué)識(shí)別的空間位置捕捉系統(tǒng),獲取大鼠顱骨解剖特征,用于解析植入靶點(diǎn)位置以及植入角度;開發(fā)高精度、高分辨率的識(shí)別與配準(zhǔn)算法,實(shí)現(xiàn)對(duì)手術(shù)執(zhí)行模組的定位。
3. 開發(fā)手術(shù)路徑規(guī)劃算法,基于視覺(jué)識(shí)別數(shù)據(jù)實(shí)現(xiàn)高精度、高靈活性、高效率的三維路徑規(guī)劃;設(shè)計(jì)可視化交互界面,實(shí)現(xiàn)人機(jī)協(xié)同工作,為醫(yī)生開展手術(shù)提供便利。
項(xiàng)目成果
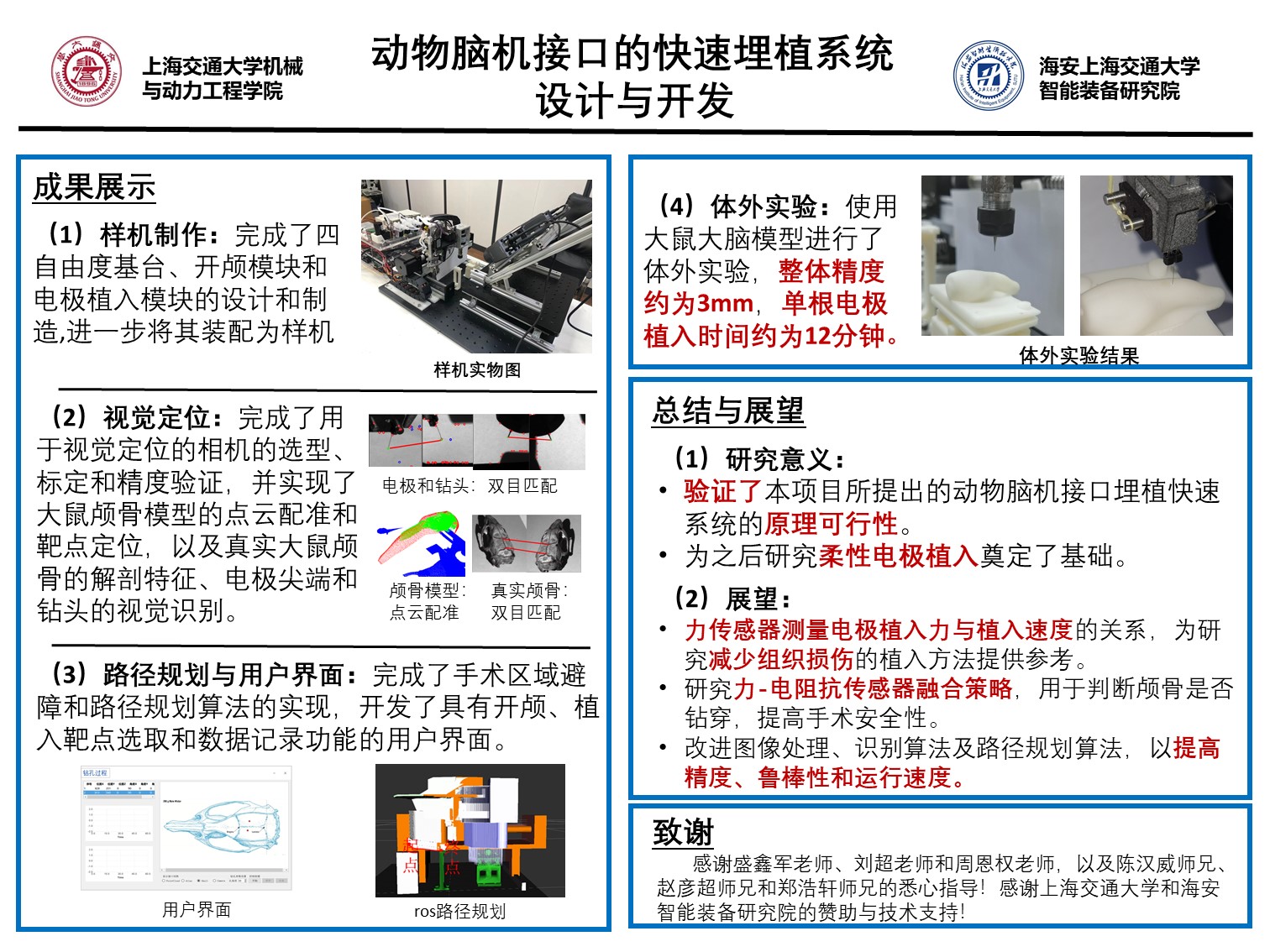
1. 完成了四自由度基臺(tái)、開顱模塊和電極植入模塊的設(shè)計(jì)和制造,在大鼠顱骨模型上開展了開顱和植入實(shí)驗(yàn)。
2. 完成了用于視覺(jué)定位的相機(jī)的選型、標(biāo)定和精度驗(yàn)證,并實(shí)現(xiàn)了大鼠顱骨模型的點(diǎn)云配準(zhǔn)和靶點(diǎn)定位,以及真實(shí)大鼠顱骨的解剖特征、電極尖端和鉆頭的視覺(jué)識(shí)別。
3. 完成了手術(shù)區(qū)域避障和路徑規(guī)劃算法的實(shí)現(xiàn),開發(fā)了具有開顱、植入靶點(diǎn)選取和數(shù)據(jù)記錄功能的用戶界面。
4. 進(jìn)行了整機(jī)聯(lián)合測(cè)試,整體精度約為3mm,單根電極植入時(shí)間約為12分鐘。




