

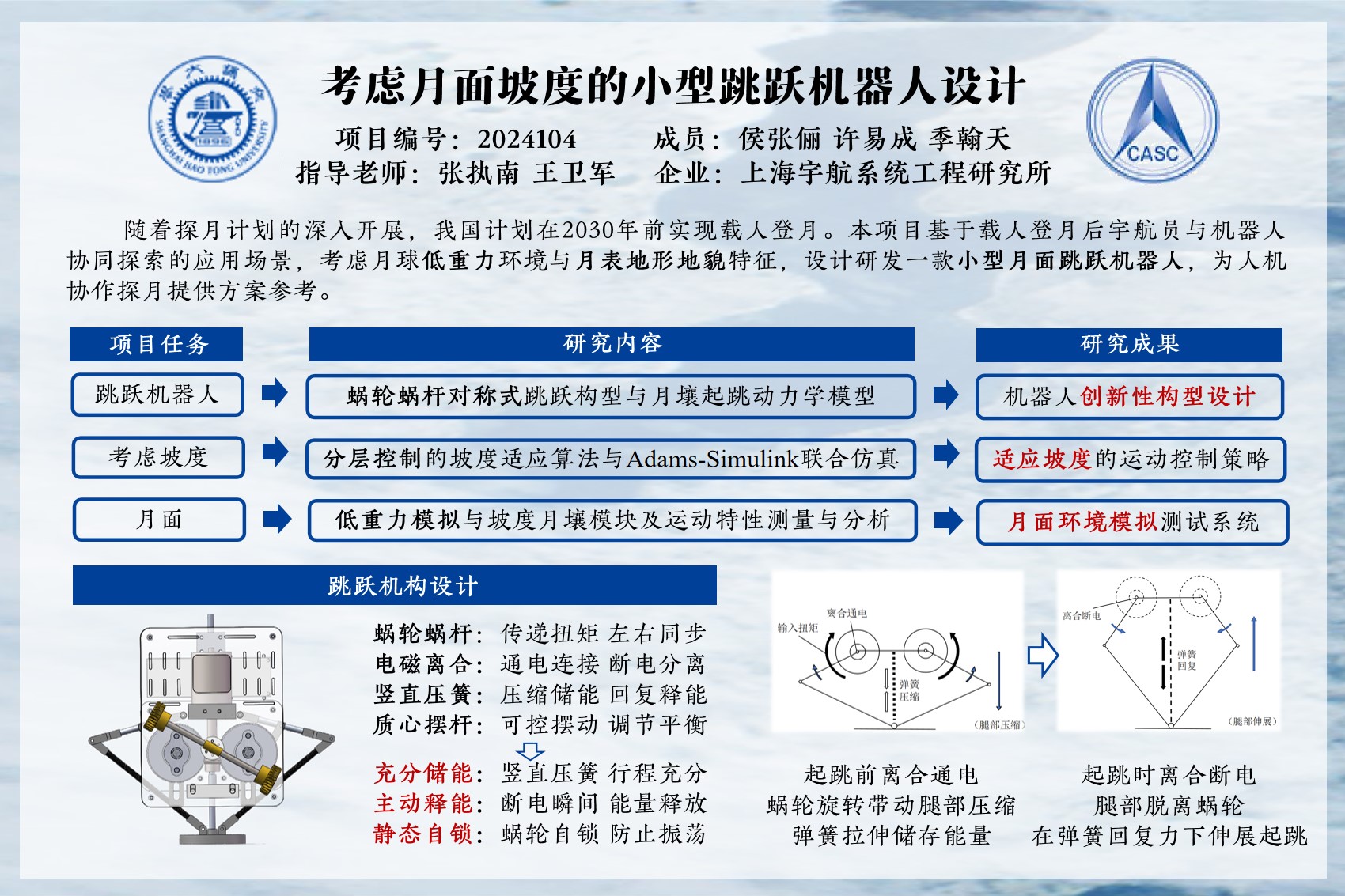
考慮月面坡度的小型跳躍機器人設(shè)計
“優(yōu)秀設(shè)計”二等獎
資助企業(yè):
 上海宇航系統(tǒng)工程研究所
上海宇航系統(tǒng)工程研究所
資助年份: 2024
企業(yè)導(dǎo)師: 王衛(wèi)軍

指導(dǎo)教師: 張執(zhí)南
項目成員: 侯張儷 許易成 季翰天
 項目海報
項目海報

 項目視頻
項目簡介
項目視頻
項目簡介
項目概述
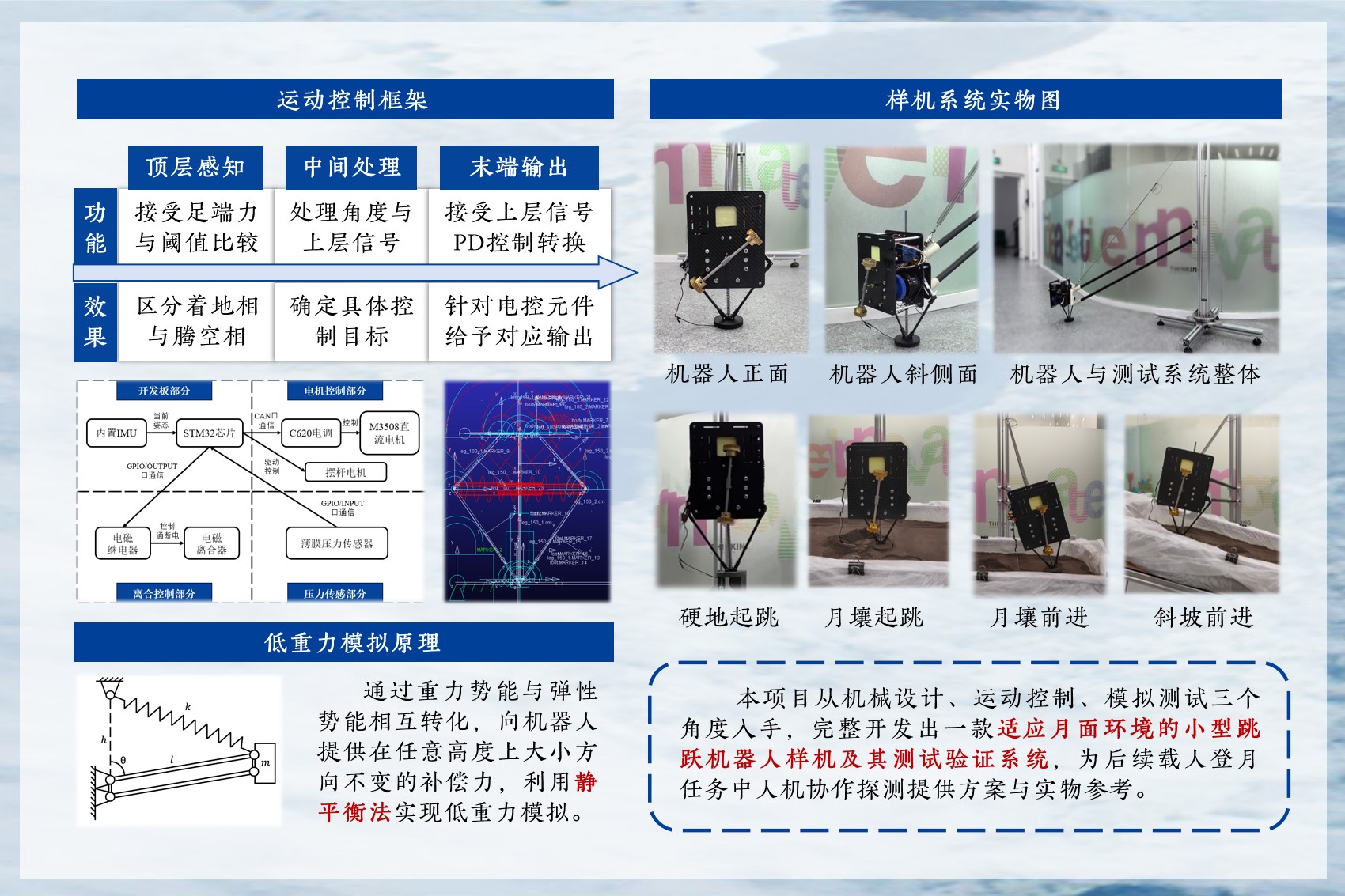
基于上海宇航系統(tǒng)工程研究所提出的研發(fā)一款適應(yīng)月球表面探索的小型協(xié)作跳躍機器人的任務(wù)需求,聚焦其在平面內(nèi)的運動實現(xiàn),考慮低重力、松軟月壤和坡度變化環(huán)境對機器人跳躍穩(wěn)定性的影響,從機械設(shè)計、運動控制和模擬測試三個方面開展研究。提出小型跳躍機器人詳細設(shè)計,針對月壤起跳進行動力學(xué)計算;結(jié)合分層控制算法和PID控制的驅(qū)動實現(xiàn)方式,開展Adams-Simulink聯(lián)合仿真測試;設(shè)計并搭建低重力環(huán)境模擬系統(tǒng)與月壤坡度調(diào)節(jié)裝置,開發(fā)實物樣機并進行相關(guān)測試。
項目目標
考慮載人登月人機協(xié)作的任務(wù)背景,創(chuàng)新性研發(fā)一款適應(yīng)于月球重力和月面地形地貌的小型跳躍機器人,并滿足相關(guān)設(shè)計指標:控制機器人整機質(zhì)量與空間尺寸在指定范圍內(nèi);機器人在運動過程中能夠適應(yīng)低重力環(huán)境,并在月面重力環(huán)境下達到企業(yè)的跳躍高度指標;適應(yīng)一定范圍內(nèi)的坡度變化,完成上下坡運動;滿足月面承載力要求,可進行松軟土壤上的可靠運動。經(jīng)前期設(shè)計和仿真測試驗證方案可行性,并最終開展實物試驗與仿真結(jié)果互相印證。
項目成果
針對任務(wù)需求與項目難點,提出了小型跳躍機器人的創(chuàng)新性構(gòu)型與月壤起跳動力學(xué)模型,制定了適應(yīng)坡度變化的跳躍運動控制策略,開發(fā)了月面環(huán)境模擬測試平臺。本項目將機械設(shè)計、運動控制、模擬測試有機結(jié)合,開發(fā)了小型跳躍機器人實物樣機與配套的模擬測試系統(tǒng),在低重力、坡度和松軟土壤環(huán)境下開展跳躍實驗,相應(yīng)形成機器人機械設(shè)計圖紙、坡度適應(yīng)運動控制算法、測試系統(tǒng)設(shè)計圖紙及機器人測試報告,為人機協(xié)作探月任務(wù)提供跳躍機器人構(gòu)型及控制與測試方案參考。




