

面向機(jī)翼深腔多余物清除作業(yè)的軟體機(jī)器人設(shè)計(jì)
“優(yōu)秀設(shè)計(jì)”三等獎(jiǎng)
資助企業(yè):
 海安上海交通大學(xué)智能裝備研究院
海安上海交通大學(xué)智能裝備研究院
資助年份: 2024
企業(yè)導(dǎo)師: 楊立擁

指導(dǎo)教師: 陳飛飛
項(xiàng)目成員: 袁睿勇,李柳言,吳勝川
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
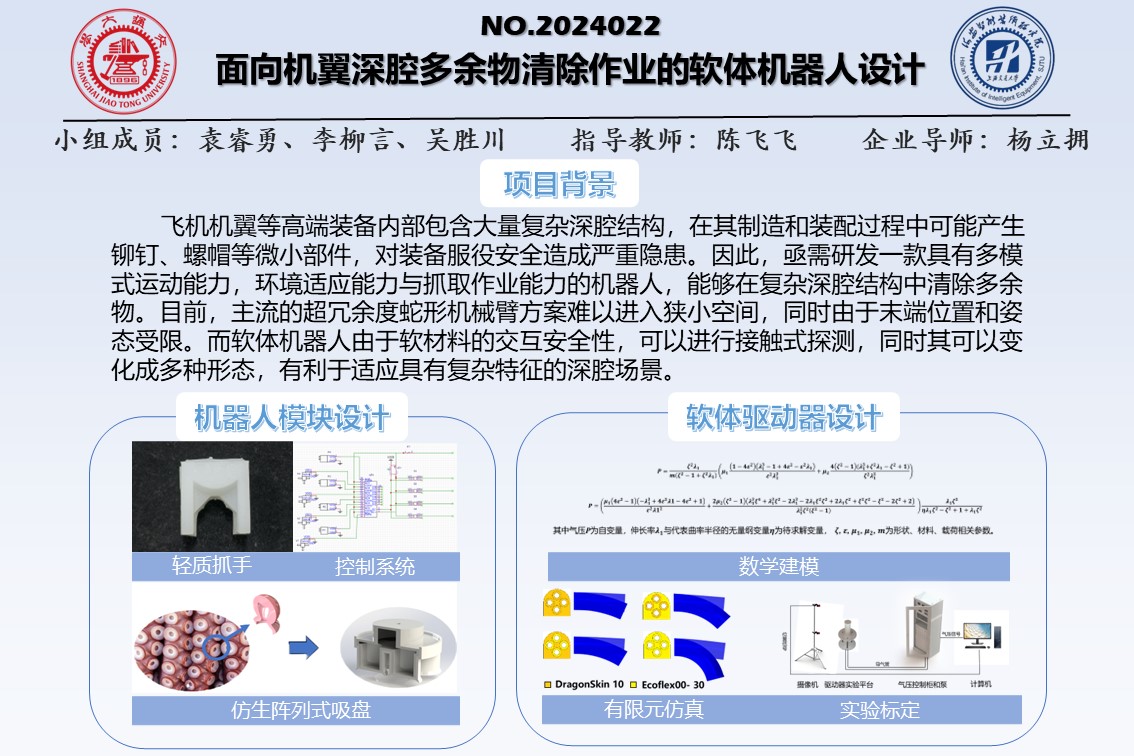
飛機(jī)機(jī)翼等高端裝備內(nèi)部包含大量復(fù)雜深腔結(jié)構(gòu),其制造和裝配過程中可能產(chǎn)生的鉚釘、螺帽等微小多余物將造成嚴(yán)重安全隱患。為此,亟待研發(fā)可用的深腔作業(yè)機(jī)器人,執(zhí)行多場(chǎng)景環(huán)境約束下的清除任務(wù)。新興的仿生軟體機(jī)器人以其交互安全性和運(yùn)動(dòng)靈活性,有望解決該挑戰(zhàn)。本項(xiàng)目圍繞軟體機(jī)器人的運(yùn)動(dòng)、抓取與控制,基于仿真和實(shí)驗(yàn),設(shè)計(jì)軟體驅(qū)動(dòng)器、軟體抓手與吸附單元,并開發(fā)氣動(dòng)控制系統(tǒng)進(jìn)行協(xié)同控制,最終完成軟體機(jī)器人的功能驗(yàn)證。
項(xiàng)目目標(biāo)
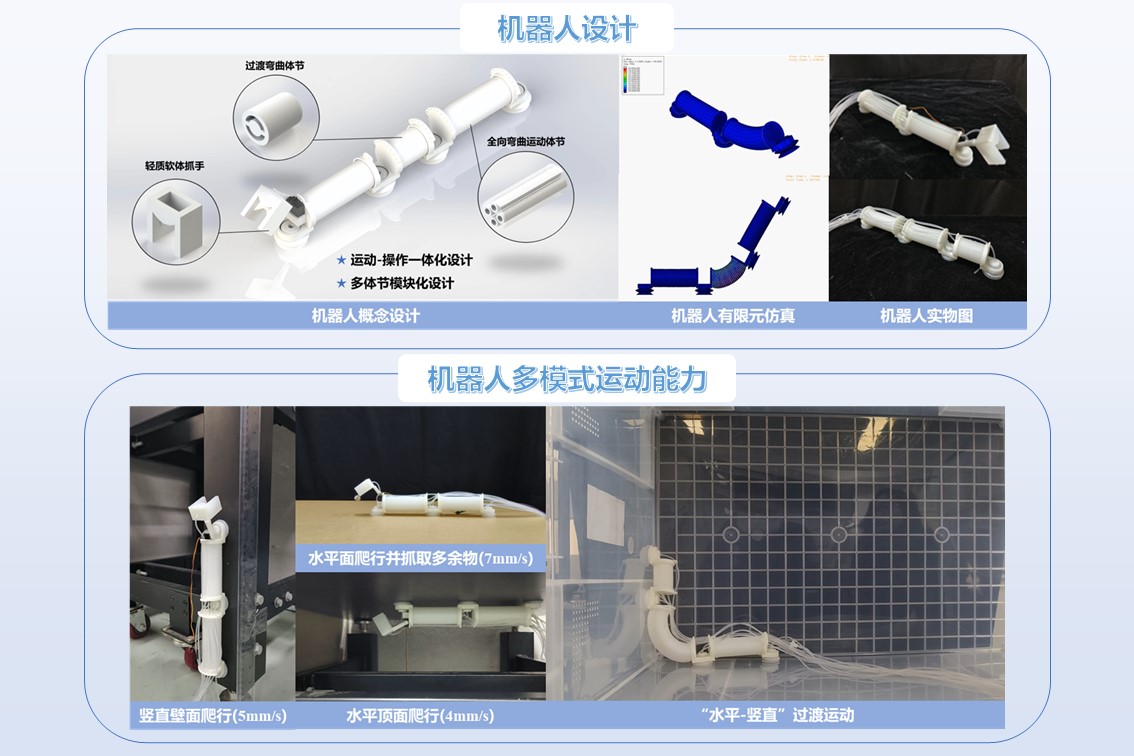
本項(xiàng)目擬設(shè)計(jì)一款軟體機(jī)器人,執(zhí)行復(fù)雜環(huán)境下多余物的清除作業(yè)。該軟體機(jī)器人需具備多模式運(yùn)動(dòng)能力,包括進(jìn)退、轉(zhuǎn)向、俯仰、爬壁、吸頂?shù)龋赃m應(yīng)斜坡、障礙、壁面、頂面等場(chǎng)景特征。安裝的軟體抓手,需具備安全性和自適應(yīng)性,以執(zhí)行多余物的抓取。該軟體機(jī)器人還需要便攜的控制系統(tǒng),能夠向多條氣路輸入指定的正負(fù)氣壓,從而驅(qū)動(dòng)軟體機(jī)器人完成預(yù)期的動(dòng)作。
項(xiàng)目成果
本項(xiàng)目對(duì)軟體驅(qū)動(dòng)器材料、形狀、長度等設(shè)計(jì)參數(shù)提出了優(yōu)化,創(chuàng)新了仿生陣列式吸盤,設(shè)計(jì)了一款軟體機(jī)器人。該軟體機(jī)器人展現(xiàn)出多模式運(yùn)動(dòng)能力,可以進(jìn)行場(chǎng)景過渡,與軟體抓手配合后,能夠?qū)Ψ且?guī)則多余物進(jìn)行抓取。本項(xiàng)目設(shè)計(jì)了相應(yīng)的氣路和電路,集成了氣動(dòng)控制系統(tǒng),實(shí)現(xiàn)了對(duì)軟體機(jī)器人的協(xié)同控制。經(jīng)實(shí)驗(yàn)驗(yàn)證,該軟體機(jī)器人成功執(zhí)行了運(yùn)動(dòng)和抓取的任務(wù)。




