

地下巡檢機(jī)器人協(xié)同定位與建模系統(tǒng)
“優(yōu)秀設(shè)計”三等獎
資助企業(yè):
 長江電力
長江電力
資助年份: 2025
企業(yè)導(dǎo)師: 黃雄

指導(dǎo)教師: 董偉
項目成員: 何梓嘉、陳宇軒
 項目海報
項目海報

 項目視頻
項目視頻
 項目簡介
項目簡介
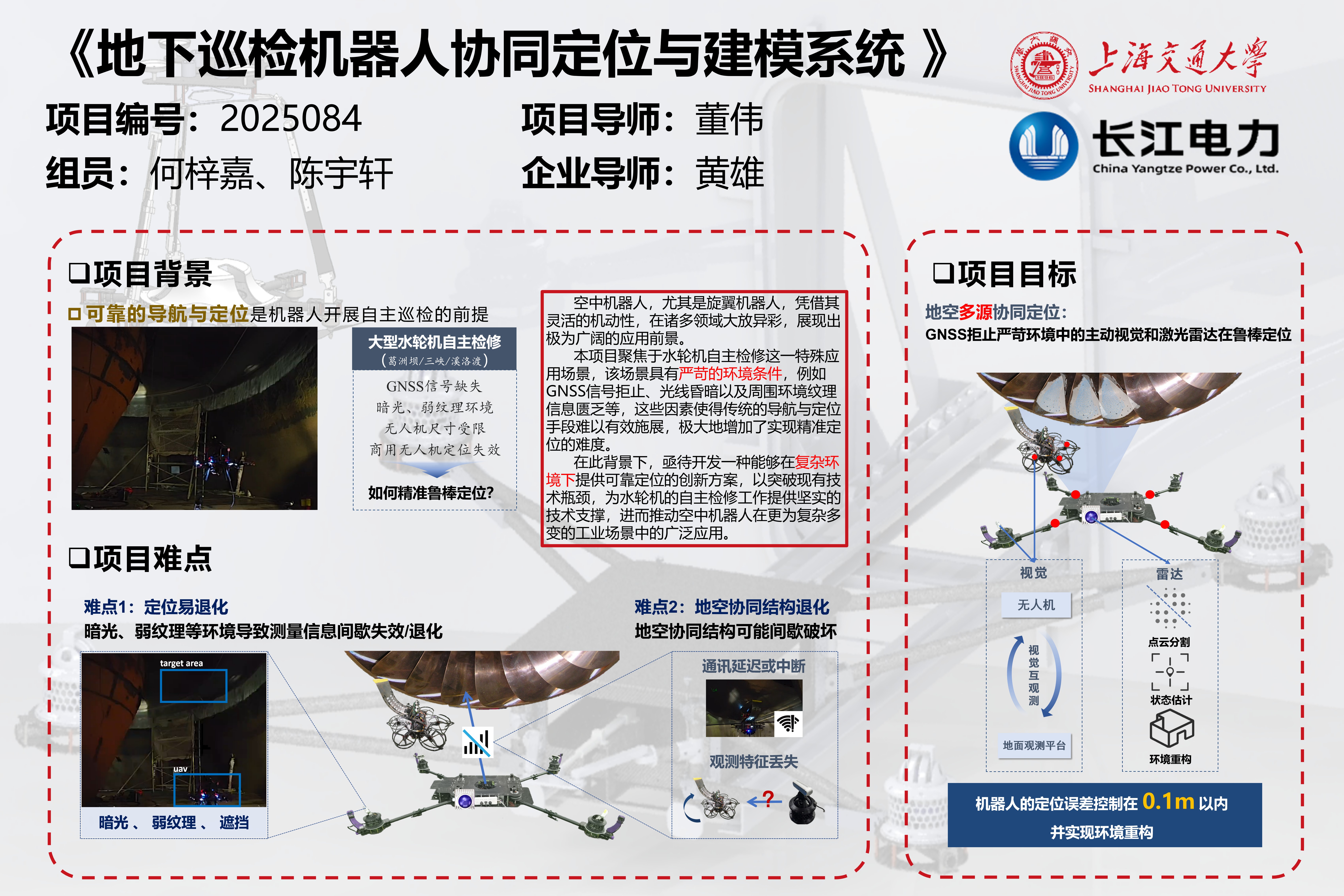
項目概述
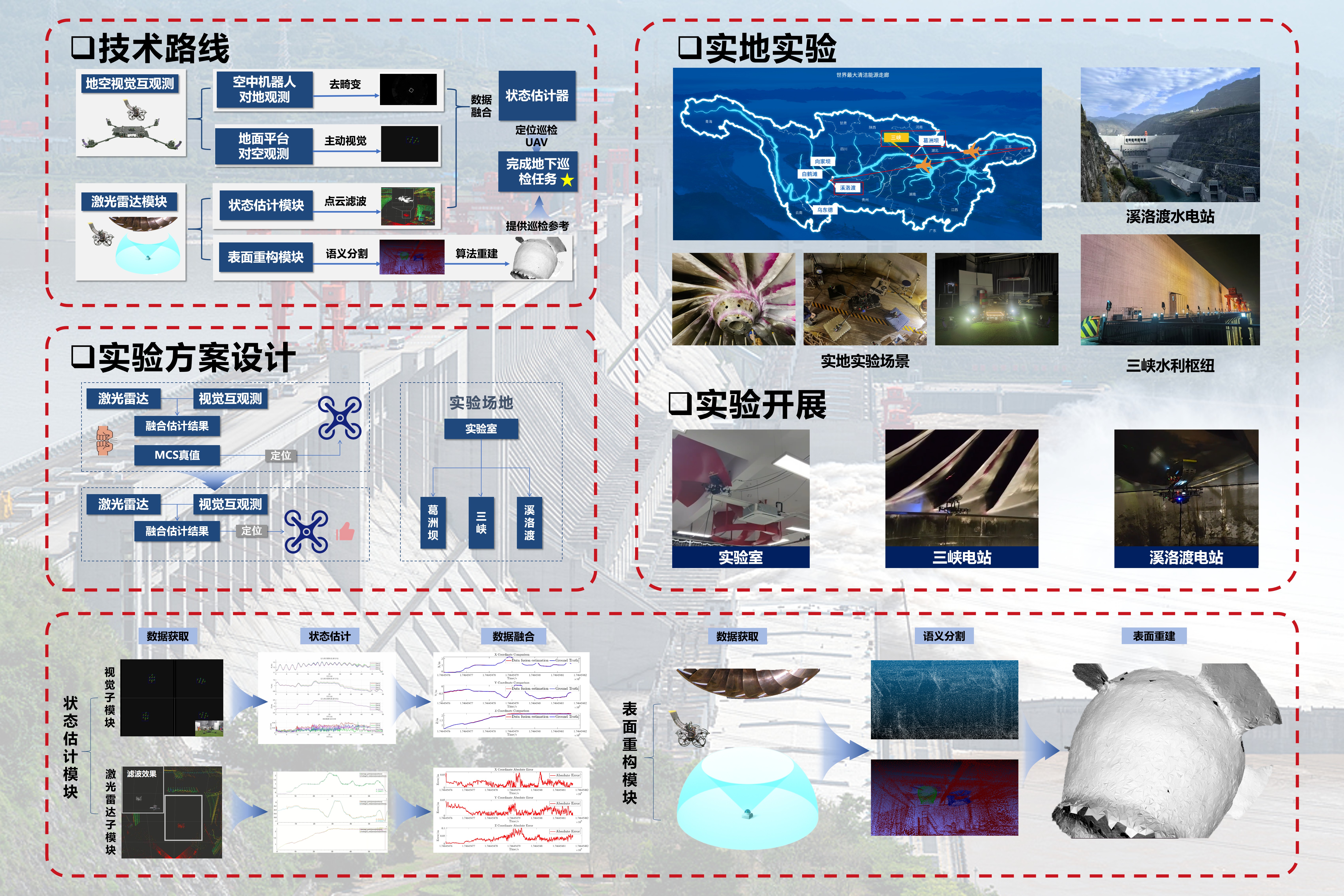
針對地下大型基礎(chǔ)設(shè)施巡檢需求,本項目研制了空中機(jī)器人協(xié)同定位與建模系統(tǒng),解決了地下環(huán)境中機(jī)器人定位與導(dǎo)航的難題。本項目關(guān)鍵技術(shù)包括為在暗光環(huán)境下利用主動視覺與激光雷達(dá)融合進(jìn)行空中機(jī)器人狀態(tài)估計與環(huán)境重構(gòu)。在視覺方面,開發(fā)了具備大范圍動態(tài)目標(biāo)跟蹤能力的主動視覺系統(tǒng),使協(xié)同機(jī)器人能夠互相觀測并提供高精度定位;在激光雷達(dá)方面,開發(fā)了點云處理系統(tǒng)提升目標(biāo)點云質(zhì)量,能夠有效提高定位精度和改善表面重構(gòu)效果。最終,通過滑動窗口降維估計器融合來自視覺和激光雷達(dá)的估計結(jié)果,從而提高了定位系統(tǒng)的魯棒性。
項目目標(biāo)
(1)基于視覺的無人機(jī)狀態(tài)估計
在地面布置多臺主動視覺相機(jī),建立多自由度運動學(xué)模型,提出協(xié)同調(diào)度方法,確保定位精度與跟蹤穩(wěn)定性。利用無人機(jī)上的紅外標(biāo)記特征,采用PnP算法實現(xiàn)6D狀態(tài)估計(位置和姿態(tài)),并通過機(jī)載與地面互觀測系統(tǒng)進(jìn)一步提升精度。性能要求:水平與垂直定位誤差(RMSE)均小于0.1m。
(2)基于激光雷達(dá)的狀態(tài)估計與環(huán)境重構(gòu)
地面激光雷達(dá)通過點云濾波投影確定無人機(jī)位置,結(jié)合卡爾曼濾波實現(xiàn)狀態(tài)估計;采用MLS平滑點云,結(jié)合kD最近鄰搜索三角化重構(gòu)環(huán)境表面。性能要求:狀態(tài)估計精度優(yōu)于0.1m。
項目成果
在暗光環(huán)境下開發(fā)主動視覺定位方法,建立機(jī)載視覺定位系統(tǒng)與地面主動視覺定位基站之間的互相觀測機(jī)制,實現(xiàn)空中機(jī)器人6D狀態(tài)估計,并通過多相機(jī)協(xié)同調(diào)度提高定位精度;開發(fā)基于激光雷達(dá)點云的狀態(tài)估計系統(tǒng),并利用多傳感器融合方法將系統(tǒng)誤差控制在0.1米以內(nèi);建立基于激光雷達(dá)的三維重建方案,用于輔助損傷定位和后續(xù)維護(hù)。上述研究成果已在三峽、葛洲壩、溪洛渡等大型水電站中進(jìn)行了驗證,為嚴(yán)苛環(huán)境下機(jī)器人的自主作業(yè)提供了一種新的定位方法,并具有在能源設(shè)施維護(hù)、災(zāi)害救援等領(lǐng)域推廣應(yīng)用的潛力。




