

管片拼裝機器人擬人化全自動拼裝關(guān)鍵技術(shù)研究
“優(yōu)秀設(shè)計”優(yōu)勝獎
資助企業(yè):
 上海智能制造功能平臺有限公司
上海智能制造功能平臺有限公司
資助年份: 2024
企業(yè)導(dǎo)師: 丁浩倫

指導(dǎo)教師: 陶建鋒
項目成員: 楊心怡、朱瑋曄、彭坦、劉敏
 項目海報
項目海報

 項目視頻
項目簡介
項目視頻
項目簡介
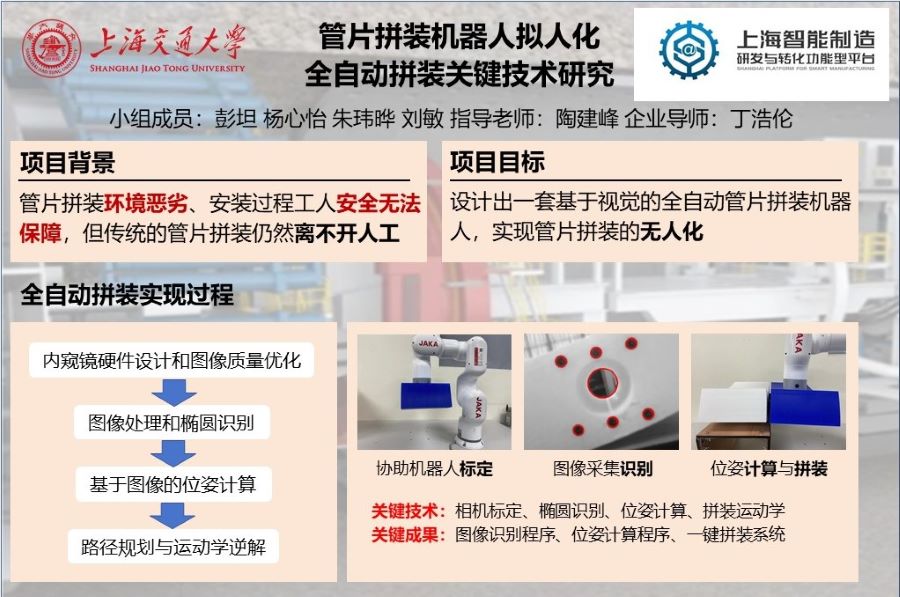
項目概述
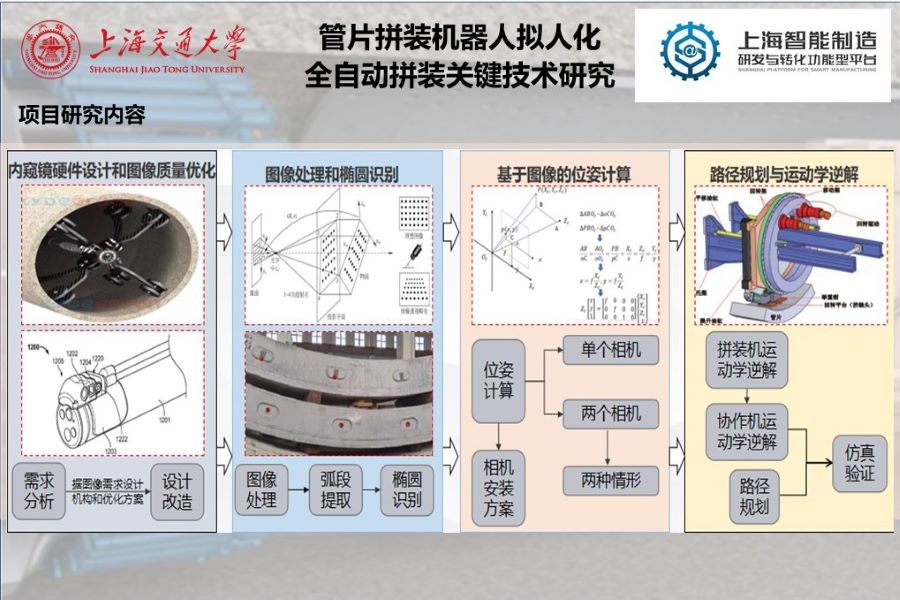
本項目致力于實現(xiàn)盾構(gòu)法隧道管片全自動無人化拼裝。通過深入分析人工拼裝過程,提取其中的核心環(huán)節(jié),結(jié)合先進感知技術(shù)與計算機技術(shù),開發(fā)出一套自動化拼裝系統(tǒng)。項目首先全面分析現(xiàn)有管片拼裝機器人的性能和人工拼裝過程,明確必要的感知能力和控制技術(shù)。在現(xiàn)有拼裝機硬件基礎(chǔ)上,通過提升感知能力和改進控制算法,實現(xiàn)全自動無人化拼裝。此技術(shù)路線具有較高的可行性和重要的理論與應(yīng)用價值。
項目目標
項目主要目標包括制定全自動拼裝方案、開發(fā)視覺感知終端樣機、設(shè)計基于機械視覺的管片對準算法并完成實驗驗證。首先,利用相機及相關(guān)硬件搭建視覺感知終端樣機;其次,運用視覺圖像處理和優(yōu)化算法,為基于視覺的待拼裝管片螺栓孔對準提供軟件支撐;然后,通過位姿計算算法求解待拼裝管片相對已拼裝管片的位姿信息;最后,利用這些位姿信息,規(guī)劃拼裝機的運動路徑,通過六自由度協(xié)助機器人模擬常規(guī)管片拼裝動作,驗證相關(guān)技術(shù)的有效性。
項目成果




