

面向地下停車場的自動駕駛車輛定位與控制技術(shù)研究
最具人氣獎
資助企業(yè):
 上海智能網(wǎng)聯(lián)汽車技術(shù)中心有限公司
上海智能網(wǎng)聯(lián)汽車技術(shù)中心有限公司
資助年份: 2021
企業(yè)導(dǎo)師: 高愷岐

指導(dǎo)教師: 王亞飛
項(xiàng)目成員: 周銘涵、丁聞?wù)堋堫mw、王文韜
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目簡介
項(xiàng)目視頻
項(xiàng)目簡介
項(xiàng)目概述
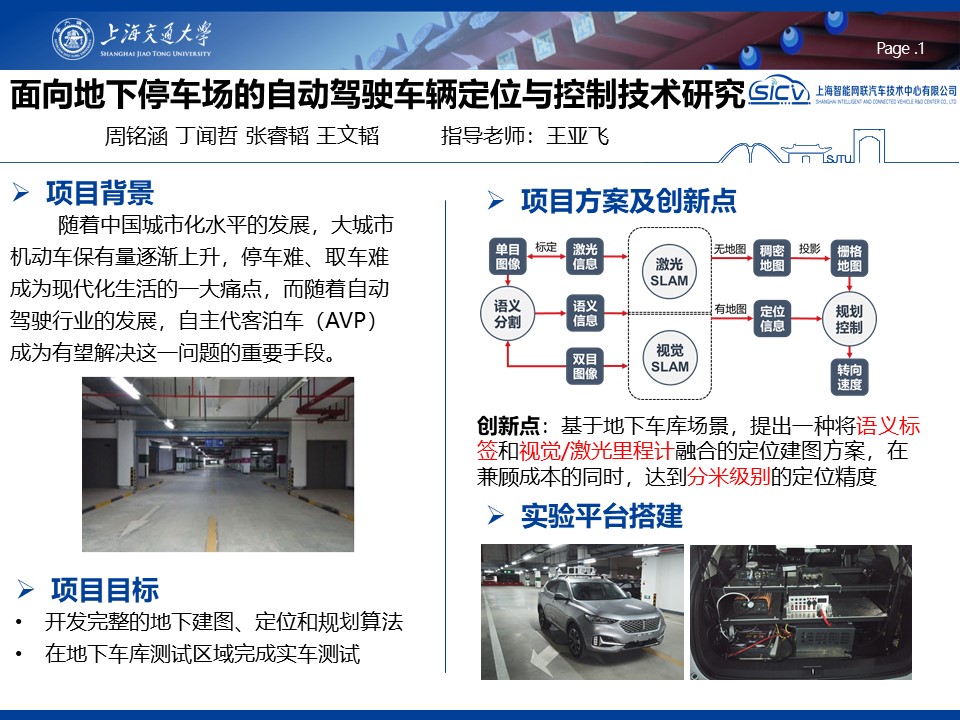
隨著時(shí)代的發(fā)展,汽車逐漸進(jìn)入到每個(gè)家庭當(dāng)中。在許多一線城市,汽車的數(shù)目更是只增不減,龐大的汽車數(shù)量使停車成為了一個(gè)費(fèi)時(shí)費(fèi)力的問題。
停車難、停車不規(guī)范并且易剮蹭都是泊車過程帶來不便。地下停車場具有無衛(wèi)星信號、場景簡單、特征重復(fù)的特點(diǎn),因此自動泊車的關(guān)鍵在于更精確的建圖與定位。小組成員一方面用兩種SLAM方法對場景進(jìn)行建圖與定位,另一方面引入語義分割提取出場景中每個(gè)物體的語義標(biāo)簽,在SLAM建圖過程中進(jìn)行優(yōu)化并剔除動態(tài)物體,從而提高建圖與定位精度。
項(xiàng)目目標(biāo)
本項(xiàng)目的目標(biāo)是建立一套完整的從多傳感器感知到高精度建圖及定位,最后規(guī)劃并給出控制信號的地下車庫泊車系統(tǒng),實(shí)現(xiàn)在無GPS信號場景下的精準(zhǔn)建圖、定位及規(guī)劃。
從細(xì)節(jié)上講,即第一,能對原始的單目和雙目圖像處理出穩(wěn)定的語義信息并傳給SLAM系統(tǒng);第二,激光SLAM與視覺SLAM分別利用語義信息,改進(jìn)特征點(diǎn)提取、剔除動態(tài)物體與優(yōu)化建圖,將二維帶語義的柵格地圖傳給規(guī)劃控制系統(tǒng);第三,利用地圖中的可行駛區(qū)域語義標(biāo)簽、實(shí)時(shí)定位信息進(jìn)行全局規(guī)劃,在過程中使用局部規(guī)劃進(jìn)行避障及給出具體的方向盤轉(zhuǎn)角與油門開度,最終使車輛行駛至目標(biāo)車位附近。
項(xiàng)目成果
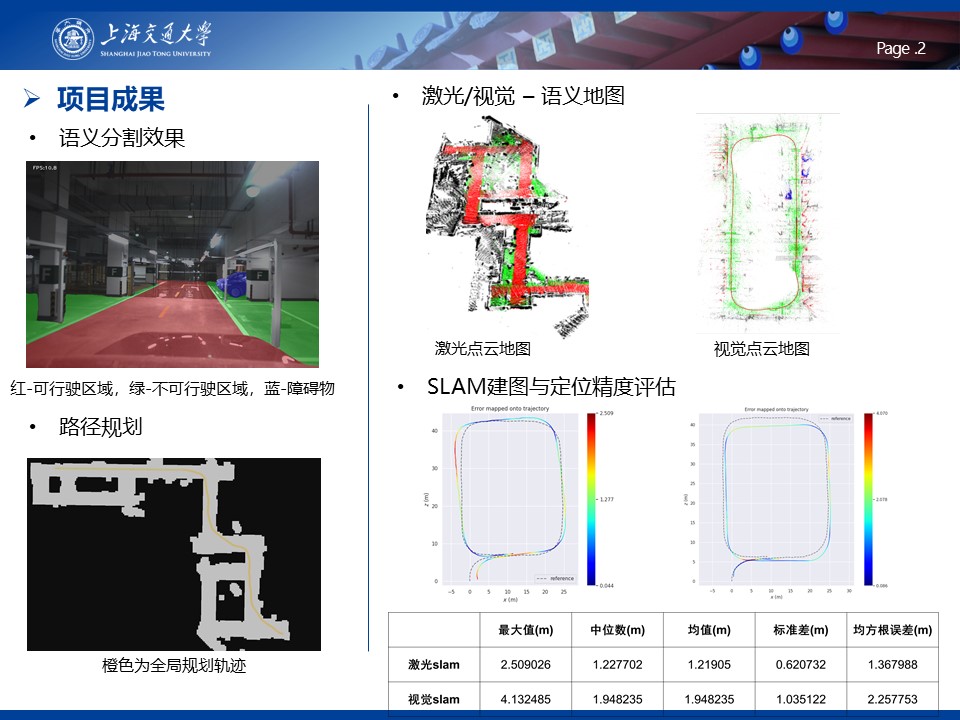
語義分割部分通過采集數(shù)據(jù),自行標(biāo)注并建立訓(xùn)練集,訓(xùn)練DeepLabV3神經(jīng)網(wǎng)絡(luò)模型,完成對地下車庫的語義分割和實(shí)時(shí)預(yù)測。
在激光里程計(jì)對地下車庫實(shí)時(shí)建圖過程中,可對于關(guān)鍵幀的特征點(diǎn)云投上語義,最終建出帶有語義的全局地圖,并投影成柵格地圖, 實(shí)驗(yàn)結(jié)果表明,該激光SLAM系統(tǒng)的平均軌跡誤差為1.2米。
本項(xiàng)目的視覺SLAM部分前端基于雙目直接法完成對相機(jī)運(yùn)動的直接估計(jì),后端基于特征點(diǎn)法引入回環(huán)檢測優(yōu)化全局軌跡,同時(shí)建立特征點(diǎn)詞帶以實(shí)現(xiàn)重定位功能。實(shí)驗(yàn)結(jié)果表明,該視覺SLAM系統(tǒng)的平均軌跡誤差為1.6米。
路徑規(guī)劃部分實(shí)現(xiàn)基于柵格地圖的的軌跡規(guī)劃和軌跡跟蹤。




