

火箭回收合作目標(biāo)位姿視覺測量與作業(yè)引導(dǎo)技術(shù)研究
機械工程資助企業(yè): 上海智能制造功能平臺有限公司
資助年份: 2025
企業(yè)導(dǎo)師: 郁艷

指導(dǎo)教師: 陳曉波
項目成員: 石育彰,錢翰陽,黎澤鑫
 項目海報
項目海報

 項目視頻
項目視頻
 項目簡介
項目簡介
項目概述
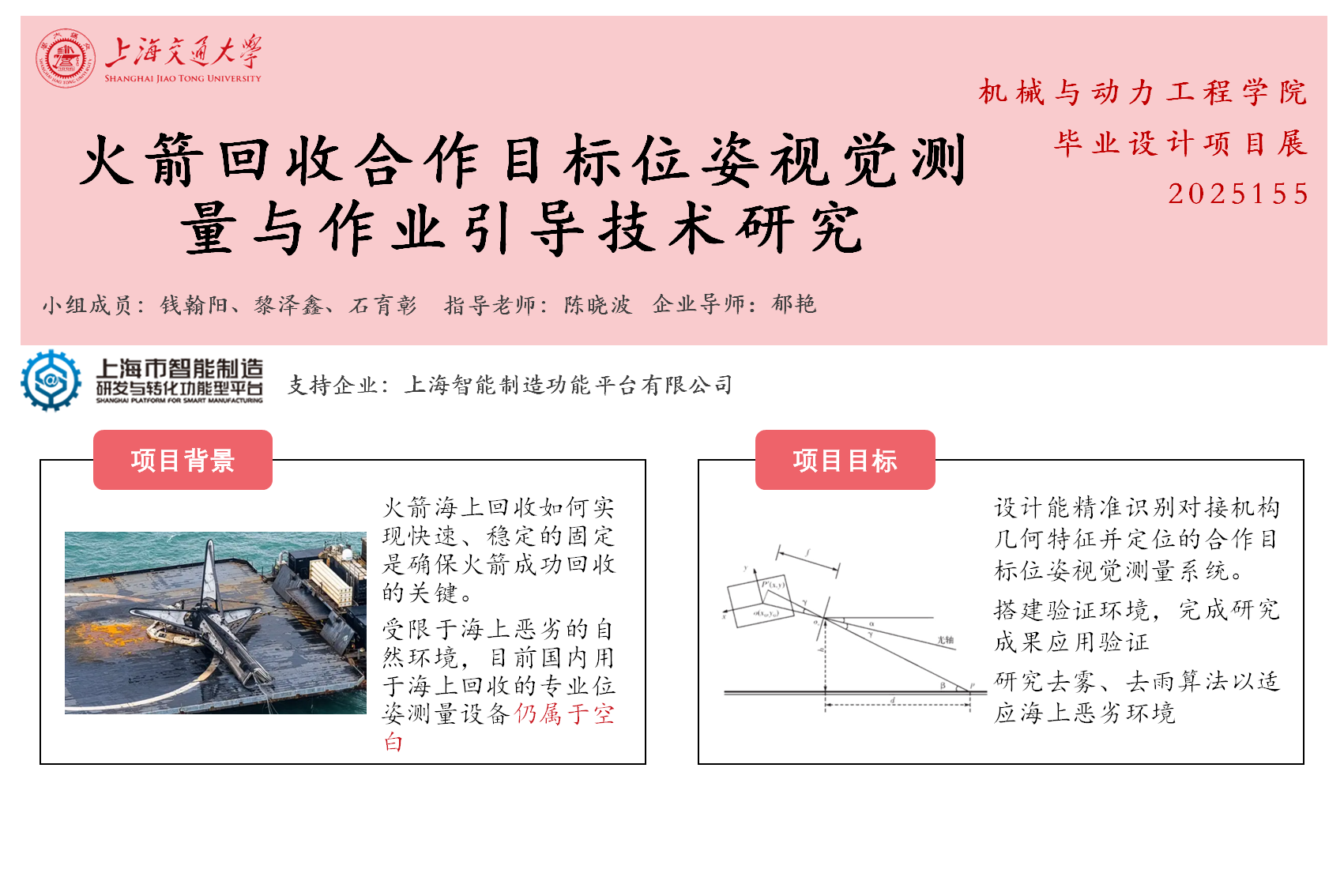
火箭海上回收相較于陸上回收有更大的運力和經(jīng)濟優(yōu)勢,我國也計劃于今年實現(xiàn)可重復(fù)使用火箭的首飛。但由于海上風(fēng)浪大,回收船顛簸,且火箭助推器重心高易傾倒,因此實現(xiàn)快速、穩(wěn)定的固定是確保火箭成功回收的關(guān)鍵。而海上惡劣的環(huán)境,如多霧、多雨等,都對傳統(tǒng)的測量方式提出了挑戰(zhàn),目前國內(nèi)并沒有一套成熟的助推器固定系統(tǒng)。因此,本項目旨在實現(xiàn)對助推器上對接機構(gòu)的快速準確識別,引導(dǎo)AGV機器人進行固定作業(yè)。
項目目標(biāo)
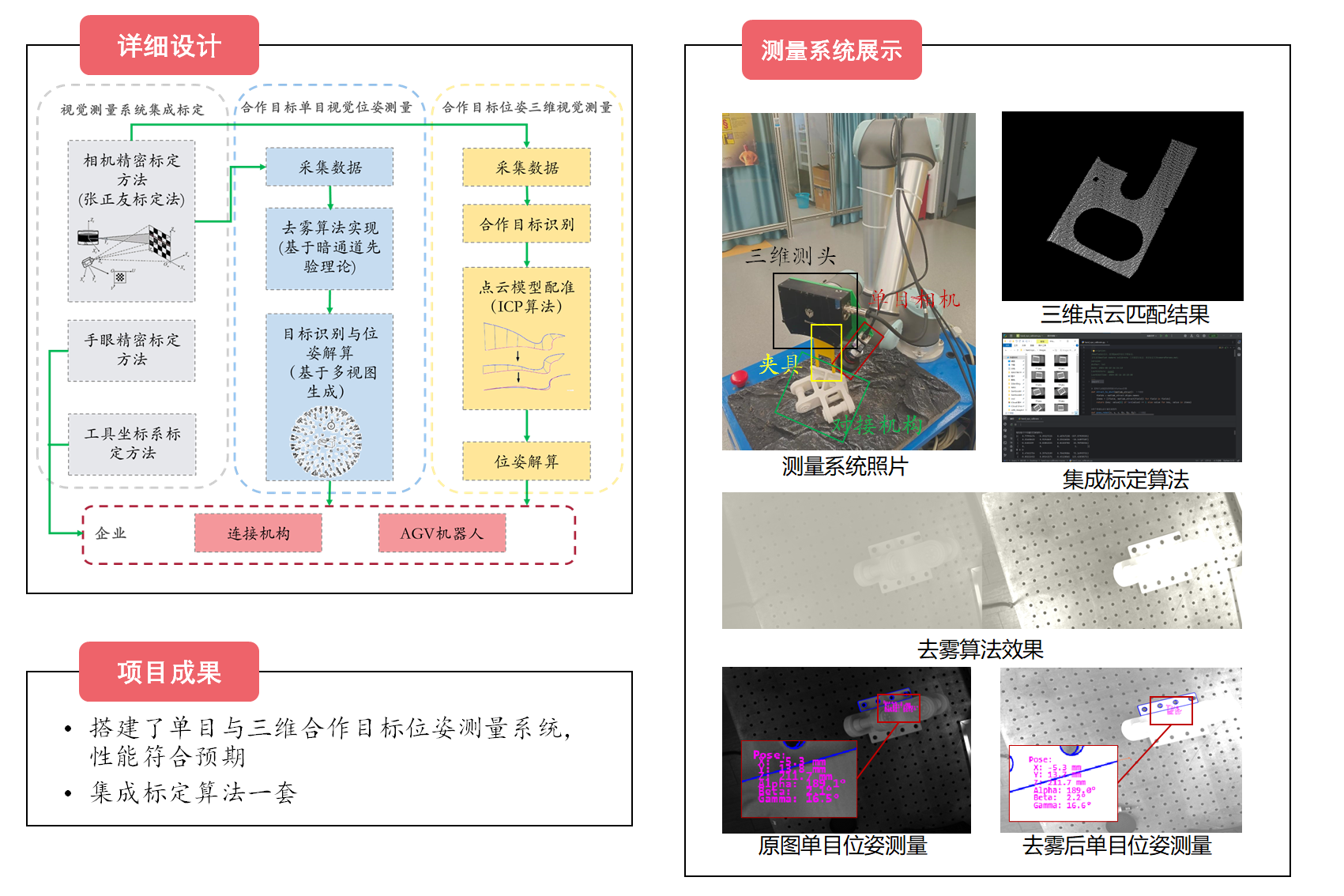
項目將分為合作目標(biāo)位姿單目視覺位姿測量、合作目標(biāo)三維視覺測量技術(shù)和視覺測量系統(tǒng)集成標(biāo)定三個部分開展研究。利用三維視覺與單目視覺分別獨立解決AGV機器人對火箭對接機構(gòu)的識別,并利用相關(guān)算法實現(xiàn)去霧等效果,以適應(yīng)海上可能存在的惡劣環(huán)境;集成標(biāo)定解決視覺系統(tǒng)標(biāo)定,手眼標(biāo)定,為后續(xù)機械臂的運動進行指導(dǎo)。最終,項目還會研制視覺測量與作業(yè)引導(dǎo)樣機系統(tǒng),開展研究成果的應(yīng)用驗證。
項目成果
項目提出了單目與三維測量兩種視覺路線進行合作目標(biāo)的位姿測量,并利用集成標(biāo)定的方法實現(xiàn)了視覺系統(tǒng)精密標(biāo)定與手眼和工具坐標(biāo)系的標(biāo)定,為AGV機器人的固定作業(yè)實現(xiàn)了引導(dǎo)功能。同時,本項目還設(shè)計出了一套視覺測量與作業(yè)引導(dǎo)樣機系統(tǒng)對模型進行了測量與驗證,實現(xiàn)了毫秒級的穩(wěn)定測量。此外,還針對多霧情況研究算法進行去霧,保證了在惡劣的環(huán)境、多噪聲情況下系統(tǒng)的穩(wěn)定性。




