

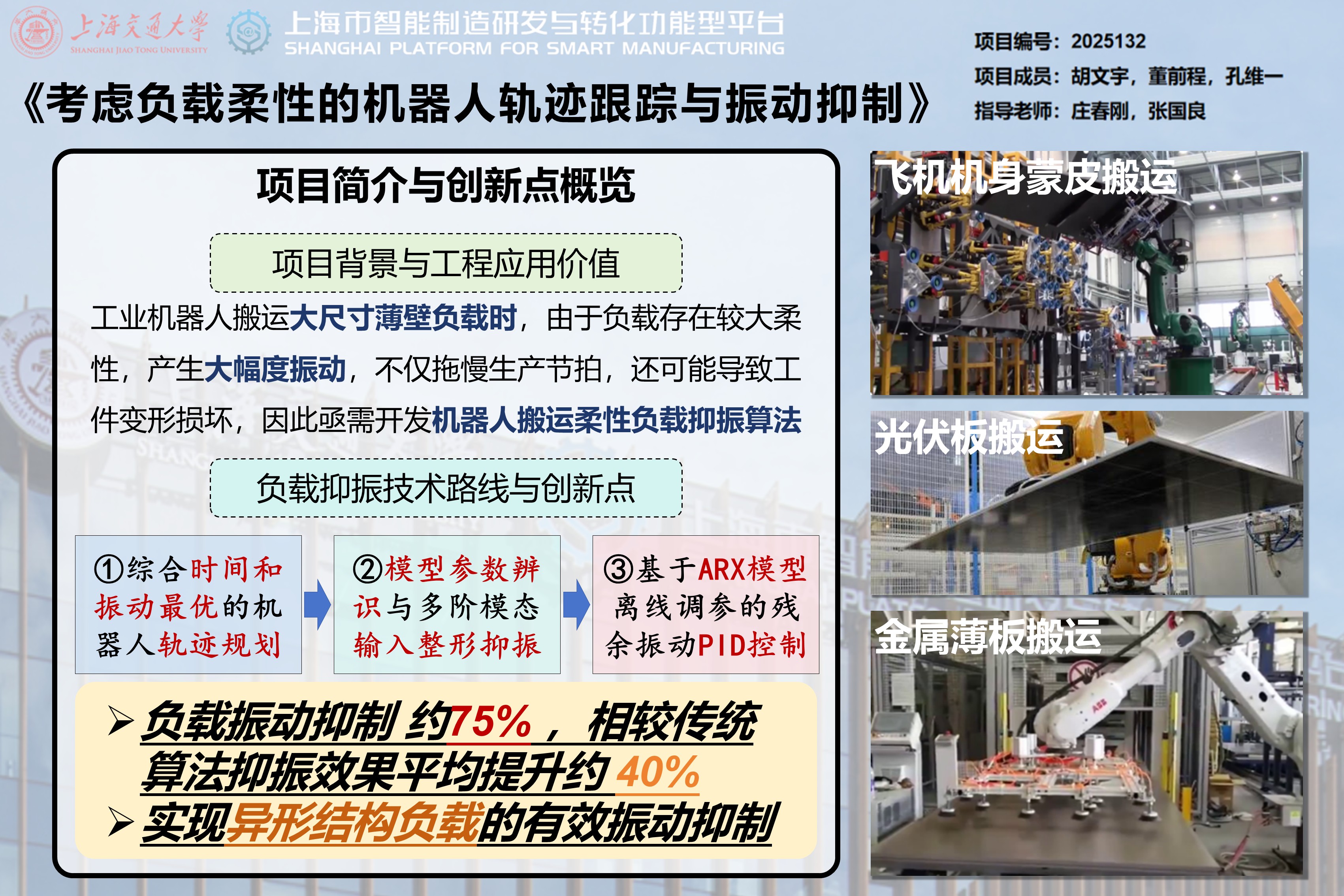
考慮負(fù)載柔性的機(jī)器人軌跡跟蹤與振動(dòng)抑制
機(jī)械工程
資助企業(yè):
 上海智能制造功能平臺(tái)有限公司
上海智能制造功能平臺(tái)有限公司
資助年份: 2025
企業(yè)導(dǎo)師: 張國(guó)良

指導(dǎo)教師: 莊春剛
項(xiàng)目成員: 胡文宇 董前程 孔維一
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
本項(xiàng)目聚焦于工業(yè)機(jī)器人在搬運(yùn)大尺寸薄壁負(fù)載(如飛機(jī)機(jī)身蒙皮、光伏板、金屬薄板)過(guò)程中因負(fù)載柔性引起的劇烈振動(dòng)問(wèn)題。柔性負(fù)載在搬運(yùn)過(guò)程中容易產(chǎn)生大幅度振動(dòng),不僅拖慢生產(chǎn)節(jié)拍,還可能導(dǎo)致工件變形或損傷,進(jìn)而降低自動(dòng)化生產(chǎn)效率。針對(duì)這一工程痛點(diǎn),項(xiàng)目系統(tǒng)性開(kāi)展了柔性負(fù)載建模、軌跡規(guī)劃優(yōu)化、以及基于模型的振動(dòng)抑制策略研究,最終實(shí)現(xiàn)機(jī)器人在搬運(yùn)柔性負(fù)載時(shí)的高精度軌跡跟蹤與高效振動(dòng)控制。
項(xiàng)目目標(biāo)
本項(xiàng)目旨在開(kāi)發(fā)一套適用于工業(yè)機(jī)器人柔性負(fù)載搬運(yùn)場(chǎng)景的軌跡優(yōu)化與抑振控制技術(shù),具體目標(biāo)包括:(1)提出綜合時(shí)間最優(yōu)與振動(dòng)最優(yōu)的機(jī)器人軌跡規(guī)劃方法;(2)基于ARX模型實(shí)現(xiàn)離線調(diào)參的振動(dòng)抑制PID控制策略;(3)辨識(shí)薄板負(fù)載的多階模態(tài)模型參數(shù),實(shí)現(xiàn)多模態(tài)輸入整形抑振(4)驗(yàn)證算法在搬運(yùn)異形負(fù)載中的魯棒性與實(shí)用性。通過(guò)多項(xiàng)關(guān)鍵技術(shù)協(xié)同,提升柔性負(fù)載搬運(yùn)過(guò)程的控制精度與振動(dòng)抑制。
項(xiàng)目成果
項(xiàng)目成功構(gòu)建了柔性負(fù)載辨識(shí)與抑振控制一體化方案,實(shí)現(xiàn)軌跡規(guī)劃與模型控制雙重優(yōu)化。通過(guò)多階模態(tài)輸入整形與殘余振動(dòng)控制,柔性負(fù)載的振動(dòng)幅值平均降低約75%,相較傳統(tǒng)算法提升約40%。該方法廣泛適用于薄壁件搬運(yùn)場(chǎng)景,顯著提高了自動(dòng)化搬運(yùn)的安全性與效率。此外,研究成果已在多類典型負(fù)載(如異形PMMA板與6061鋁合金板)實(shí)驗(yàn)中驗(yàn)證,展示出良好的通用性與工程應(yīng)用前景。




