

磁驅(qū)動主動脈瓣置換手術(shù)機(jī)器人設(shè)計
機(jī)械工程
資助企業(yè):
 術(shù)銳(上海)科技有限公司
術(shù)銳(上海)科技有限公司
資助年份: 2025
企業(yè)導(dǎo)師: 陳煜陽

指導(dǎo)教師: 徐凱
項目成員: 黃陳飛翔 孫修潔 鄧松康
 項目海報
項目海報

 項目視頻
項目簡介
項目視頻
項目簡介
項目概述
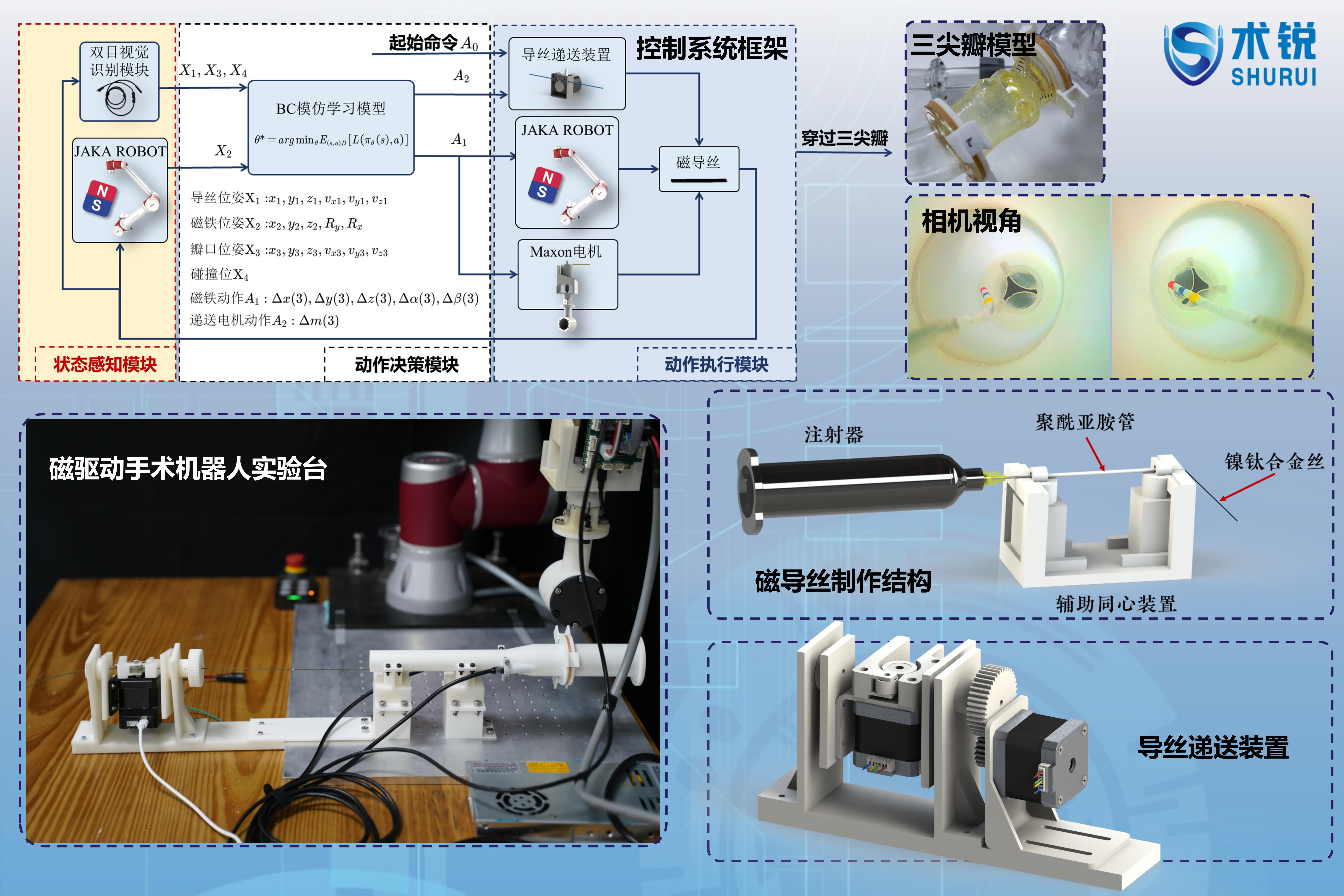
本項目針對經(jīng)導(dǎo)管主動脈瓣置換術(shù)(TAVR)中導(dǎo)絲控制靈活性較差、瓣口穿越困難等問題,設(shè)計并研發(fā)了一套基于磁驅(qū)動和模仿學(xué)習(xí)的主動脈瓣置換手術(shù)機(jī)器人系統(tǒng)。系統(tǒng)通過機(jī)械臂控制永磁鐵和驅(qū)動電機(jī)實現(xiàn)導(dǎo)絲的可控運動,基于雙目視覺系統(tǒng)實現(xiàn)對導(dǎo)絲尖端和主動脈瓣口的識別和定位,完成了從狀態(tài)感知—動作決策—指令執(zhí)行的完整閉環(huán)控制流程設(shè)計和搭建。系統(tǒng)采用模仿學(xué)習(xí)策略,基于專家演示數(shù)據(jù)完成動作策略學(xué)習(xí),最終實現(xiàn)了磁控導(dǎo)絲對主動脈瓣口的自主精準(zhǔn)穿越,為智能化、高魯棒性的TAVR手術(shù)提供了系統(tǒng)性技術(shù)解決方案。
項目目標(biāo)
本項目旨在構(gòu)建一套具備自主導(dǎo)航能力的磁驅(qū)動主動脈瓣置換手術(shù)機(jī)器人系統(tǒng),以實現(xiàn)磁控導(dǎo)絲主動脈瓣口穿越過程的智能化替代。項目目標(biāo)包括:設(shè)計和優(yōu)化磁控導(dǎo)絲結(jié)構(gòu),使其具備優(yōu)良硬磁性與柔順性能;搭建集成雙目視覺系統(tǒng)的血管-心臟瓣膜模擬平臺,集成包含機(jī)械臂、末端旋轉(zhuǎn)電機(jī)和導(dǎo)絲驅(qū)動電機(jī)等的多硬件控制系統(tǒng);基于視覺識別結(jié)果和模仿學(xué)習(xí)策略搭建閉環(huán)控制流程,完成磁控導(dǎo)絲自主穿越心臟主動脈瓣口的任務(wù),實現(xiàn)對磁驅(qū)動主動脈瓣置換手術(shù)機(jī)器人的手術(shù)原理性驗證。
項目成果
本項目完成了磁驅(qū)動主動脈瓣置換手術(shù)機(jī)器人的硬件系統(tǒng)集成和自主控制軟件系統(tǒng)搭建,實現(xiàn)了從狀態(tài)感知—動作決策—指令執(zhí)行的完整閉環(huán)控制流程;優(yōu)化設(shè)計了具有高柔順性和大角度彎曲能力的磁控導(dǎo)絲結(jié)構(gòu),并完成導(dǎo)絲在磁場下的變形仿真和實驗驗證;基于雙目視覺系統(tǒng)實現(xiàn)了對導(dǎo)絲尖端和主動脈瓣口的識別和定位,對視覺識別、系統(tǒng)狀態(tài)獲取、動作控制等功能進(jìn)行模塊化封裝;搭建專家演示數(shù)據(jù)循環(huán)采集系統(tǒng),運用模仿學(xué)習(xí)策略訓(xùn)練系統(tǒng)完成自主控制磁導(dǎo)絲穿越主動脈瓣口的任務(wù),驗證了手術(shù)機(jī)器人系統(tǒng)的自主性、智能化和魯棒性。




