

空間自生長柔性變剛度機(jī)械臂
機(jī)械工程
資助企業(yè):
 湖南郎靈科技有限公司
湖南郎靈科技有限公司
資助年份: 2022
企業(yè)導(dǎo)師: 鄧志剛

指導(dǎo)教師: 張文明
項目成員: 房付熠,魏星宇,王敘寧
 項目海報
項目海報

 項目視頻
項目簡介
項目視頻
項目簡介
項目概述
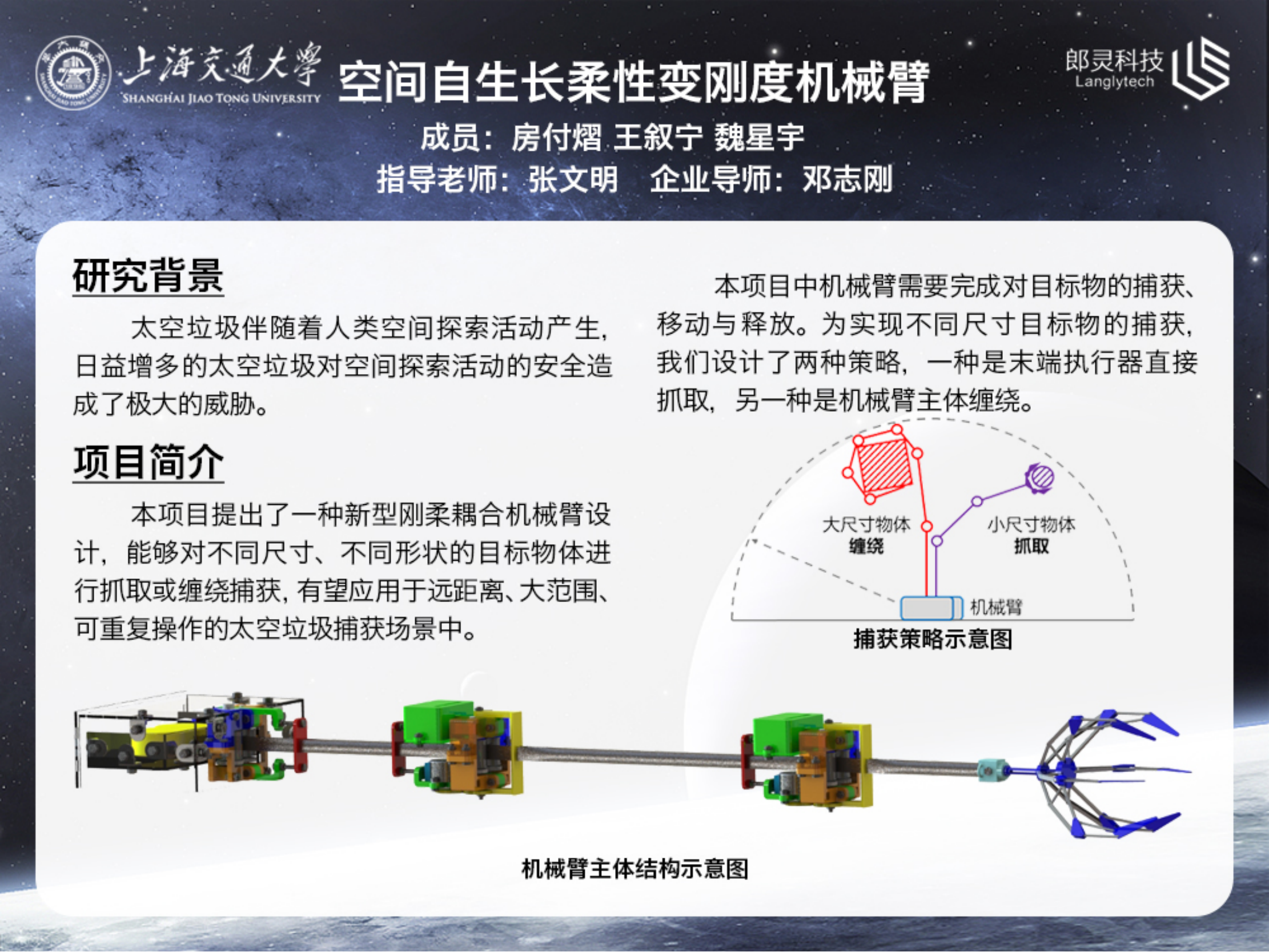
太空垃圾伴隨著人類空間探索活動產(chǎn)生,日益增多的太空垃圾對人類太空探索活動的安全造成了極大的威脅。為此,太空垃圾清理成為亟需解決的世界性難題,如何實現(xiàn)多次可重復(fù)的目標(biāo)轉(zhuǎn)移以及自適應(yīng)、跨尺寸的空間捕獲,成為了本項目關(guān)注的重點(diǎn)。本項目提出了一種新型剛?cè)狁詈蠙C(jī)械臂設(shè)計,具有空間自生長、柔性變剛度等特征,能夠?qū)Σ煌叽纭⒉煌螤畹哪繕?biāo)物體進(jìn)行抓取或纏繞捕獲,有望應(yīng)用于遠(yuǎn)距離、大范圍、可重復(fù)操作的太空垃圾捕獲場景中。
項目目標(biāo)
太空垃圾伴隨著人類空間探索活動產(chǎn)生。廢棄的航天器、碰撞或爆炸產(chǎn)生的碎片都可能成為太空垃圾的來源。由于太空垃圾處于在軌高速運(yùn)動狀態(tài),即使體積較小的碎片也可能引發(fā)災(zāi)難性的后果。日益增多的太空垃圾對人類太空探索活動的安全造成了極大的威脅。為此,太空垃圾清除成為亟需解決的世界性難題。但現(xiàn)有清除方式,無法完美解決相關(guān)問題。因此,如何實現(xiàn)多次可重復(fù)的目標(biāo)轉(zhuǎn)移以及自適應(yīng)、跨尺寸的空間捕獲,成為了本項目的主要目標(biāo)。
項目成果
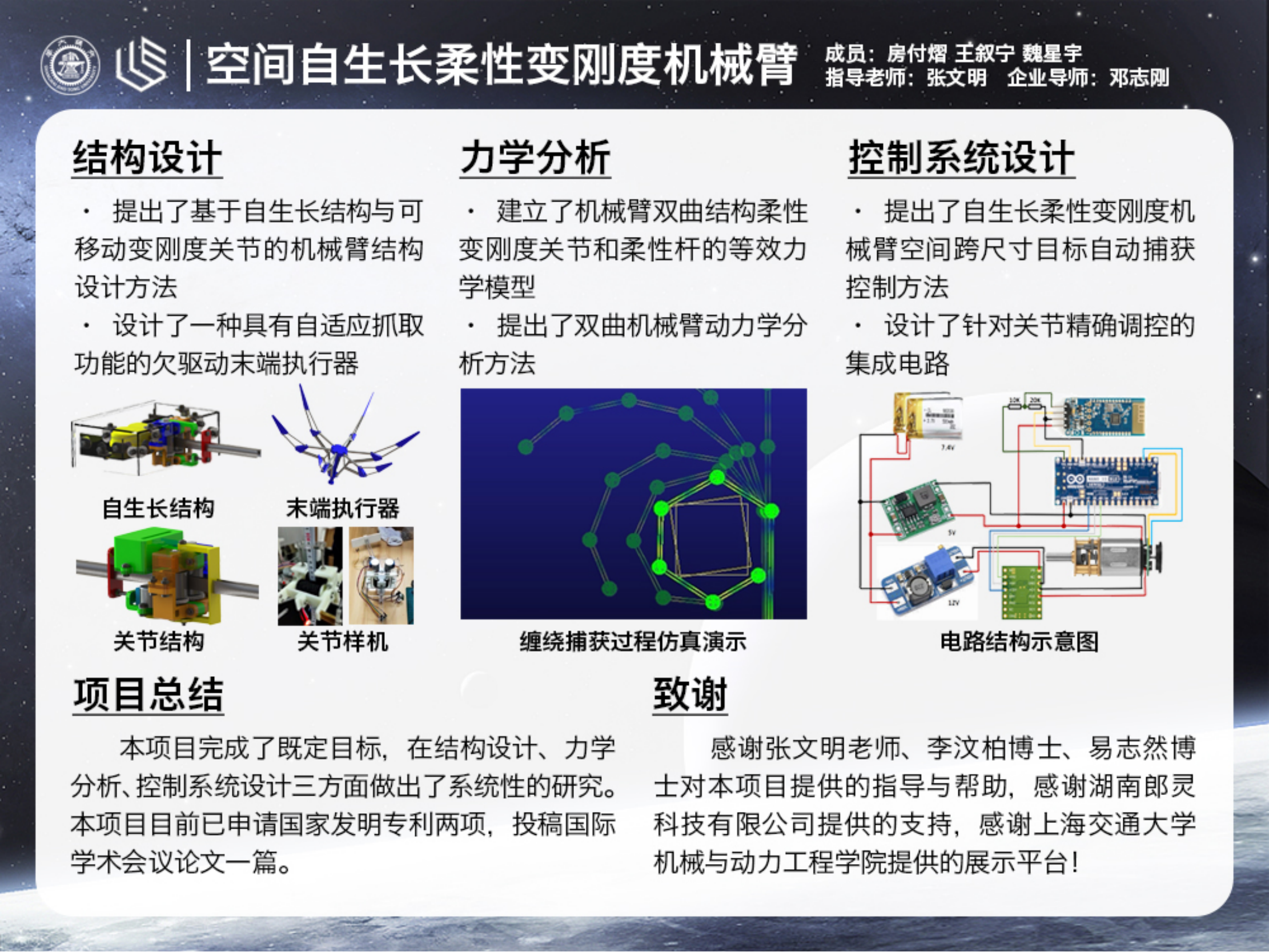
本項目提出了基于自生長結(jié)構(gòu)與可移動變剛度關(guān)節(jié)的剛?cè)狁詈蠙C(jī)械臂結(jié)構(gòu)設(shè)計方法,建立了機(jī)械臂柔性變剛度關(guān)節(jié)和柔性桿等效力學(xué)模型,提出了機(jī)械臂空間跨尺寸目標(biāo)自動捕獲控制方法。本項目提出的新型剛?cè)狁詈蠙C(jī)械臂設(shè)計具有空間自生長、柔性變剛度等特征,能夠?qū)Σ煌叽纭⒉煌螤畹哪繕?biāo)物體進(jìn)行抓取或纏繞捕獲,有望應(yīng)用于遠(yuǎn)距離、大范圍、可重復(fù)操作的太空垃圾捕獲場景中。本項目目前已申請國家發(fā)明專利兩項,投稿國際學(xué)術(shù)會議論文一篇。




