

新型E/E架構(gòu)下的自動(dòng)緊急制動(dòng)系統(tǒng)匹配性開(kāi)發(fā)
機(jī)械工程
資助企業(yè):
 智車(上海)實(shí)業(yè)有限公司
智車(上海)實(shí)業(yè)有限公司
資助年份: 2022
企業(yè)導(dǎo)師: 沈康麒

指導(dǎo)教師: 張希
項(xiàng)目成員: 盧浩巍,石英魁,沈浩然
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)


 項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
汽車“新四化”以及“軟件定義汽車”趨勢(shì)的不斷深化使得智能汽車系統(tǒng)復(fù)雜度提高,汽車電子電氣架構(gòu)革新成為必由之路,而功能域各子系統(tǒng)的統(tǒng)一標(biāo)準(zhǔn)開(kāi)發(fā)與控制器融合是實(shí)現(xiàn)E/E架構(gòu)向集中式演進(jìn)的前提。因此,本項(xiàng)目面向L2.5級(jí)自動(dòng)駕駛的域集中式EEA發(fā)展,以自動(dòng)緊急制動(dòng)系統(tǒng)為研究對(duì)象,設(shè)計(jì)開(kāi)發(fā)了一套完整的融合自動(dòng)駕駛感知算法與基礎(chǔ)決策控制模型、符合AUTOSAR國(guó)際統(tǒng)一標(biāo)準(zhǔn)的控制器軟件平臺(tái),并對(duì)系統(tǒng)模型進(jìn)行了測(cè)試驗(yàn)證,為智能汽車E/E架構(gòu)演進(jìn)提供了支持與實(shí)踐。
項(xiàng)目目標(biāo)
從L2.5級(jí)自動(dòng)駕駛功能域下的自動(dòng)緊急制動(dòng)系統(tǒng)軟件功能需求出發(fā),分析確定AEB系統(tǒng)具體功能實(shí)現(xiàn)方案,并給出符合域集中式E/E架構(gòu)演進(jìn)實(shí)際需求的AEB系統(tǒng)軟件架構(gòu),設(shè)計(jì)并搭建符合控制器具體功能的通信架構(gòu)及功能架構(gòu);基于深度學(xué)習(xí)方法與特定自動(dòng)駕駛數(shù)據(jù)集實(shí)現(xiàn)面向本項(xiàng)目AEB系統(tǒng)應(yīng)用場(chǎng)景的道路目標(biāo)感知神經(jīng)網(wǎng)絡(luò)模型;遵循車用控制器開(kāi)發(fā)的國(guó)際標(biāo)準(zhǔn),進(jìn)一步完成AEB系統(tǒng)控制器完整的設(shè)計(jì)與開(kāi)發(fā)流程,并對(duì)所開(kāi)發(fā)的自動(dòng)緊急制動(dòng)系統(tǒng)通過(guò)在環(huán)測(cè)試以及ECU功能仿真等方式進(jìn)行測(cè)試驗(yàn)證。
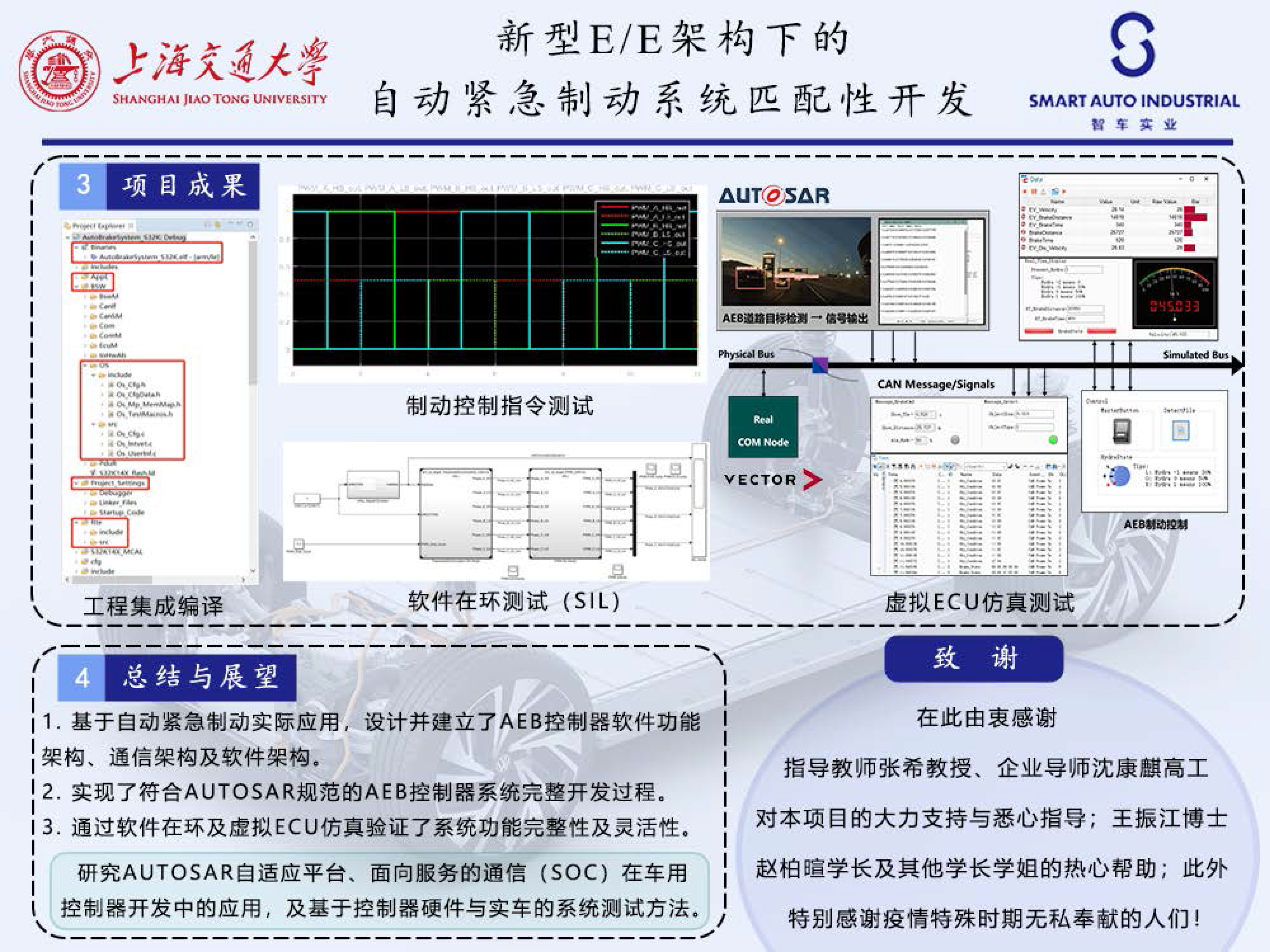
項(xiàng)目成果
本項(xiàng)目面向汽車E/E架構(gòu)演進(jìn)方向,研究并實(shí)現(xiàn)了汽車功能域子系統(tǒng)AEB控制器基于AUTOSAR統(tǒng)一標(biāo)準(zhǔn)的匹配性開(kāi)發(fā):1.基于自動(dòng)緊急制動(dòng)系統(tǒng)具體功能,設(shè)計(jì)并建立了AEB系統(tǒng)控制器功能架構(gòu)、通信架構(gòu)及軟件架構(gòu);2.設(shè)計(jì)并融合了自動(dòng)駕駛實(shí)際應(yīng)用場(chǎng)景下的道路目標(biāo)感知算法及基礎(chǔ)決策控制模型;3.基于普華的ORIENTAIS Studio系列工具規(guī)范化地實(shí)現(xiàn)了符合AUTOSAR國(guó)際標(biāo)準(zhǔn)的AEB控制器應(yīng)用完整開(kāi)發(fā)過(guò)程;4.通過(guò)模型在環(huán)測(cè)試、軟件在環(huán)測(cè)試及基于CANoe-CAPL的系統(tǒng)ECU仿真驗(yàn)證了系統(tǒng)功能完整性與靈活性。




