

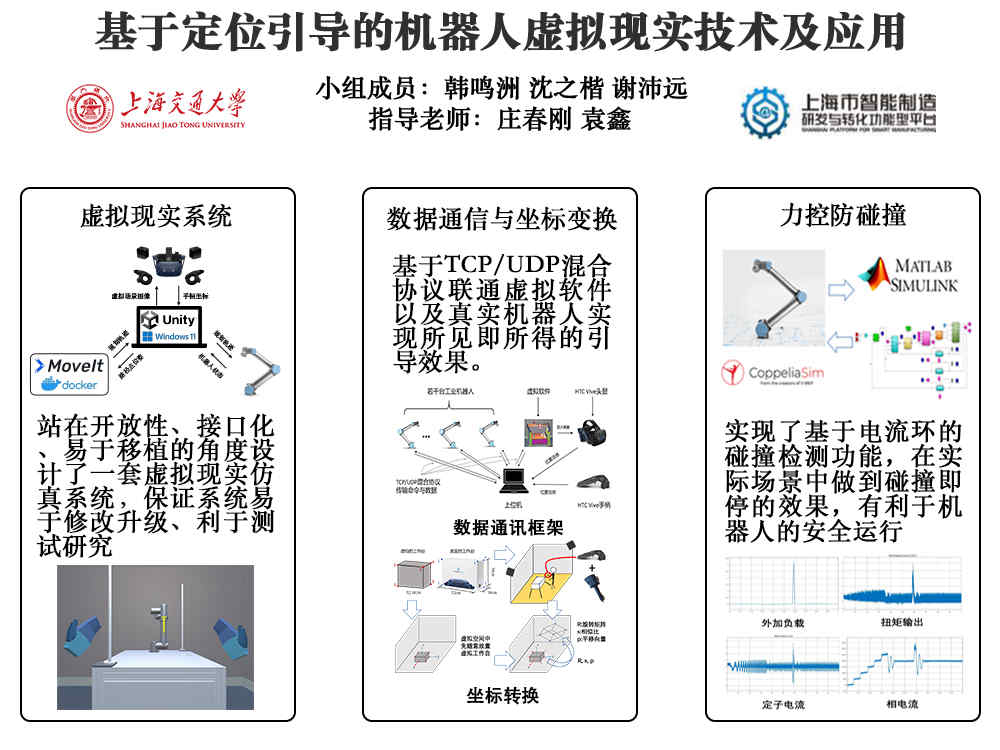
基于定位引導(dǎo)的機(jī)器人虛擬現(xiàn)實(shí)技術(shù)及應(yīng)用
機(jī)械工程
資助企業(yè):
 上海智能制造功能平臺(tái)有限公司
上海智能制造功能平臺(tái)有限公司
資助年份: 2022
企業(yè)導(dǎo)師: 袁鑫

指導(dǎo)教師: 莊春剛
項(xiàng)目成員: 韓鳴洲 沈之楷 謝沛遠(yuǎn)
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)


 項(xiàng)目視頻
項(xiàng)目視頻
 項(xiàng)目簡(jiǎn)介
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
制造業(yè)中,工業(yè)機(jī)器人在面對(duì)焊接、上下料和裝配等典型工業(yè)場(chǎng)景時(shí),常需要技術(shù)人員針對(duì)具體情況對(duì)機(jī)器人進(jìn)行重新示教和編程。這種情況下,換型時(shí)間長(zhǎng),操作復(fù)雜,效率低下,對(duì)工人技術(shù)要求也較高。因此,工業(yè)界需要開發(fā)一種新型的定位與引導(dǎo)方式實(shí)現(xiàn)簡(jiǎn)單、高效、柔性的智能引導(dǎo)操作。基于虛擬現(xiàn)實(shí)的定位引導(dǎo)技術(shù)精度高,成本低,操作簡(jiǎn)單,非常適合作為機(jī)器人定位與引導(dǎo)技術(shù)的新嘗試。本課題中,我們計(jì)劃將定位引導(dǎo)技術(shù)與機(jī)器人力控操作進(jìn)行結(jié)合,開發(fā)簡(jiǎn)單易操作的機(jī)器人智能引導(dǎo)系統(tǒng),同時(shí)開發(fā)基于關(guān)節(jié)電流的機(jī)器人防碰撞監(jiān)控功能,實(shí)現(xiàn)機(jī)器人工作站的智能引導(dǎo),點(diǎn)位定位,軌跡復(fù)現(xiàn)與簡(jiǎn)單裝配動(dòng)作實(shí)現(xiàn)。
項(xiàng)目目標(biāo)
本課題中,我們計(jì)劃基于unity3D搭建虛擬現(xiàn)實(shí)仿真系統(tǒng),使用Docker container配置MoveIt和URSim需要的環(huán)境,分別進(jìn)行路徑規(guī)劃與數(shù)據(jù)通信測(cè)試。同時(shí),開發(fā)數(shù)據(jù)分析與解耦算法將操作端的位置與位姿與真實(shí)機(jī)器人的坐標(biāo)位姿進(jìn)行雙向聯(lián)接,實(shí)現(xiàn)虛擬系統(tǒng)與真實(shí)機(jī)器人工作站的雙向控制,開發(fā)簡(jiǎn)單軟件界面與坐標(biāo)位姿匹配算法,用于實(shí)時(shí)顯示機(jī)器人工作站實(shí)時(shí)狀態(tài)并進(jìn)行簡(jiǎn)單指令操作。此外,我們還計(jì)劃開發(fā)基于機(jī)器人關(guān)節(jié)電流的力控安全防碰撞功能,用于智能引導(dǎo)在實(shí)際工業(yè)場(chǎng)景如焊接焊縫識(shí)別、裝配動(dòng)作等進(jìn)行應(yīng)用時(shí)提供簡(jiǎn)單的人機(jī)共融能力,為智能引導(dǎo)系統(tǒng)在典型應(yīng)用中的柔性化提供助力。
項(xiàng)目成果
本項(xiàng)目站在開放性、接口化、易于移植的角度設(shè)計(jì)了一套虛擬現(xiàn)實(shí)仿真系統(tǒng),保證系統(tǒng)易于修改升級(jí)、利于測(cè)試研究。并利用虛擬現(xiàn)實(shí)軟件聯(lián)通了虛擬系統(tǒng)與真實(shí)機(jī)器人系統(tǒng),并將其利用與工業(yè)場(chǎng)景,實(shí)現(xiàn)簡(jiǎn)單高效的機(jī)器人作業(yè)。同時(shí)實(shí)現(xiàn)了基于電流環(huán)監(jiān)測(cè)的力控防碰撞功能,在實(shí)現(xiàn)功能的同時(shí)沒有涉及復(fù)雜的理論計(jì)算,通過VREP-MATLAB進(jìn)行了聯(lián)合仿真測(cè)試。但由于本學(xué)期條件的影響,本項(xiàng)目目前還需要在實(shí)機(jī)上進(jìn)行進(jìn)一步的測(cè)試,從精確度的方面對(duì)系統(tǒng)做出進(jìn)一步的調(diào)試或者設(shè)計(jì)上的改進(jìn)。




