

視覺與毫米波雷達數(shù)據(jù)融合算法在智能交通中的應(yīng)用研究
機械工程
資助企業(yè):
 上海覺云科技有限公司
上海覺云科技有限公司
資助年份: 2022
企業(yè)導(dǎo)師: 常偉

指導(dǎo)教師: 李彥明
項目成員: 鄭澤州,吳培銘
 項目海報
項目海報

 項目視頻
項目簡介
項目視頻
項目簡介
項目概述
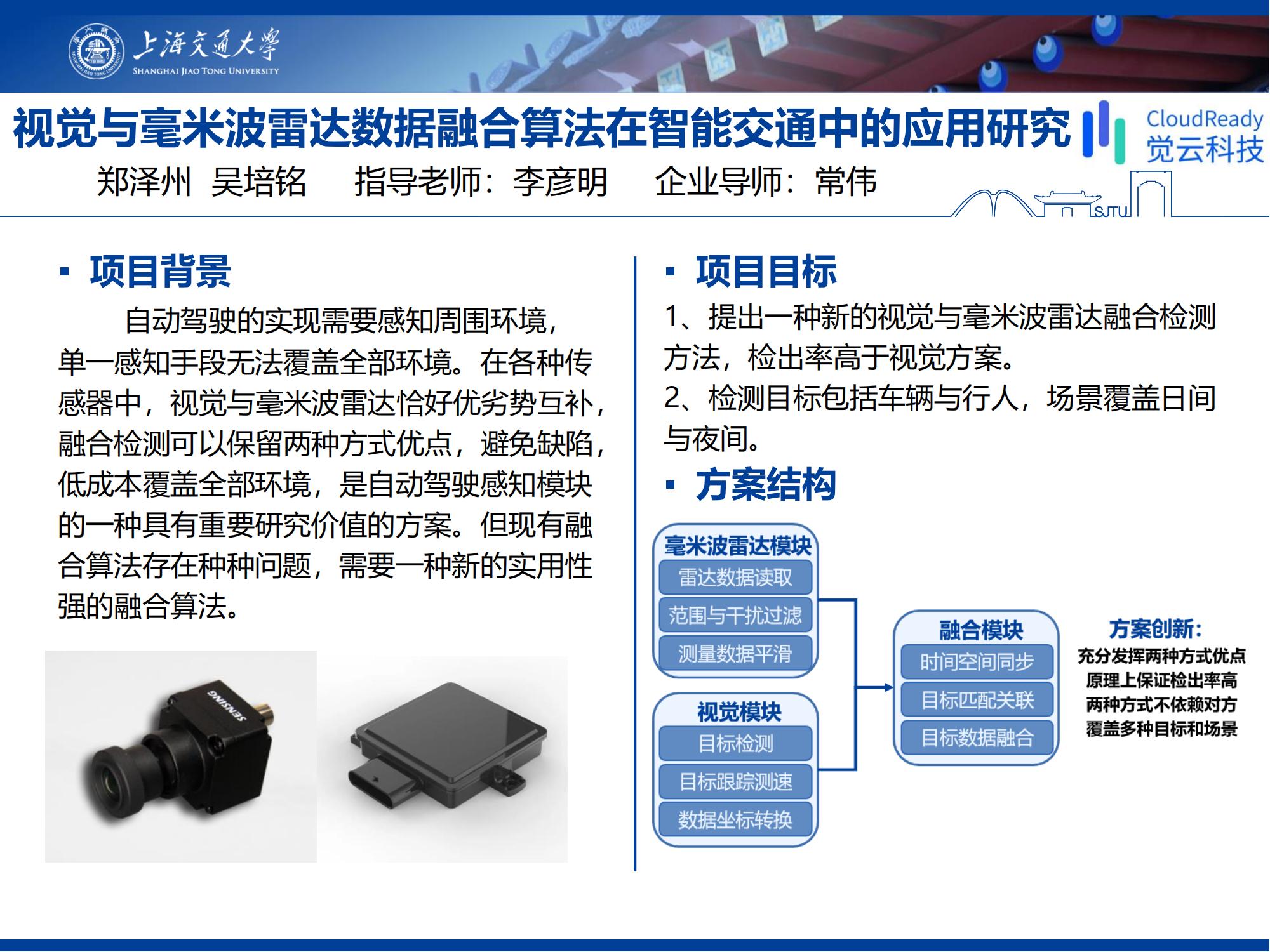
自動駕駛的實現(xiàn)需要感知周圍環(huán)境,單一感知手段無法覆蓋全部環(huán)境。在各種傳感器中,視覺與毫米波雷達恰好優(yōu)劣勢互補,融合檢測可以保留兩種方式優(yōu)點,避免缺陷,低成本覆蓋全部環(huán)境的感知,是自動駕駛感知模塊的一種具有重要研究價值的方案。但現(xiàn)有融合算法存在種種問題,需要更加實用的融合算法。本項目在充分研究現(xiàn)有方法的基礎(chǔ)上提出一種新的融合檢測算法,使用一些創(chuàng)新性的方法手段避免現(xiàn)有算法問題,取得良好的效果,相比單一檢測手段在檢出率和測量精度上都有提升,并且適用檢測目標(biāo)和場景多,滿足了企業(yè)要求。
項目目標(biāo)
目前開源的毫米波雷達與圖像融合算法,一般性能較低或配置復(fù)雜,依賴于視覺,對毫米波雷達信息使用不足,尤其對夜間情況沒有深入研究,沒有驗證同時完成汽車和行人檢測的能力,難以具備實際應(yīng)用價值,因此需要滿足實際應(yīng)用、可快速部署、能夠形成產(chǎn)品原型的融合算法。檢測算法部署在車載計算平臺上,檢測目標(biāo)類別包括車輛和行人,適用場景覆蓋日間和夜間,檢出率高于純視覺檢測,識別速度每幀小于0.1秒。
項目成果
從毫米波雷達獲取原始數(shù)據(jù),通過使用閾值過濾與生命周期法管理,以及卡爾曼濾波器,提高毫米波雷達數(shù)據(jù)的可信度和測量精度。
視覺使用YOLOv5算法進行目標(biāo)檢測,對檢測目標(biāo)通過多目標(biāo)跟蹤和坐標(biāo)系轉(zhuǎn)換實現(xiàn)單靠視覺獲取車輛坐標(biāo)系下位置速度信息。
提出了一種新的融合檢測算法,使用一些創(chuàng)新性的方法手段避免現(xiàn)有算法問題,取得良好的效果,相比單一檢測手段在檢出率和測量精度上都有提升,尤其是夜間檢出率提高約20%,并且適用檢測目標(biāo)和場景滿足了企業(yè)要求。




