

基于電觸覺和虛擬現(xiàn)實技術(shù)的靈巧手觸覺反饋與重建
機(jī)械工程資助企業(yè): 上海念通智能科技有限公司
資助年份: 2023
企業(yè)導(dǎo)師: 劉朝旭

指導(dǎo)教師: 盛鑫軍
項目成員: 許晨荃、董家奇、王方彤
 項目海報
項目海報


 項目視頻
項目視頻
 項目簡介
項目簡介
項目概述
本項目立足于解決科研用靈巧手成本過高以及商用靈巧手感知與反饋能力欠缺的重點問題,擴(kuò)展商用靈巧手的感知和反饋功能,促進(jìn)推動靈巧手感知領(lǐng)域的keyan成果向民用轉(zhuǎn)化。本項目面向靈巧手參與的人機(jī)虛擬現(xiàn)實交互訓(xùn)練場景,以SJT7機(jī)械手為平臺基礎(chǔ),期望建立基于電觸覺反饋和虛擬現(xiàn)實技術(shù)的感知與交互系統(tǒng)以實現(xiàn)觸覺信息的反饋通路,實時觀測、反饋與重建靈巧手與實際物體的交互信息,并能夠應(yīng)用于機(jī)器人遙操作以及殘疾人假肢訓(xùn)練等具體問題。
項目目標(biāo)
本項目旨在實現(xiàn)以下目標(biāo):拓展機(jī)械靈巧手的前端力位感知能力,實現(xiàn)對抓握過程中的接觸力、關(guān)節(jié)角度以及交互物體信息進(jìn)行感知;電觸覺反饋模塊能夠?qū)τ陟`巧手的前端傳感器數(shù)據(jù)以及用戶的控制意圖,通過適當(dāng)?shù)碾娪|覺反饋編碼策略實現(xiàn)觸覺信息的反饋,傳遞人機(jī)交互過程中的力觸覺和本體感;設(shè)計用于與靈巧手交互的虛擬現(xiàn)實平臺和上位機(jī)模塊,虛擬現(xiàn)實平臺可以實現(xiàn)對靈巧手的抓握過程進(jìn)行重建,上位機(jī)界面可以顯示靈巧手觸覺信息和電觸覺反饋策略控制。
項目成果
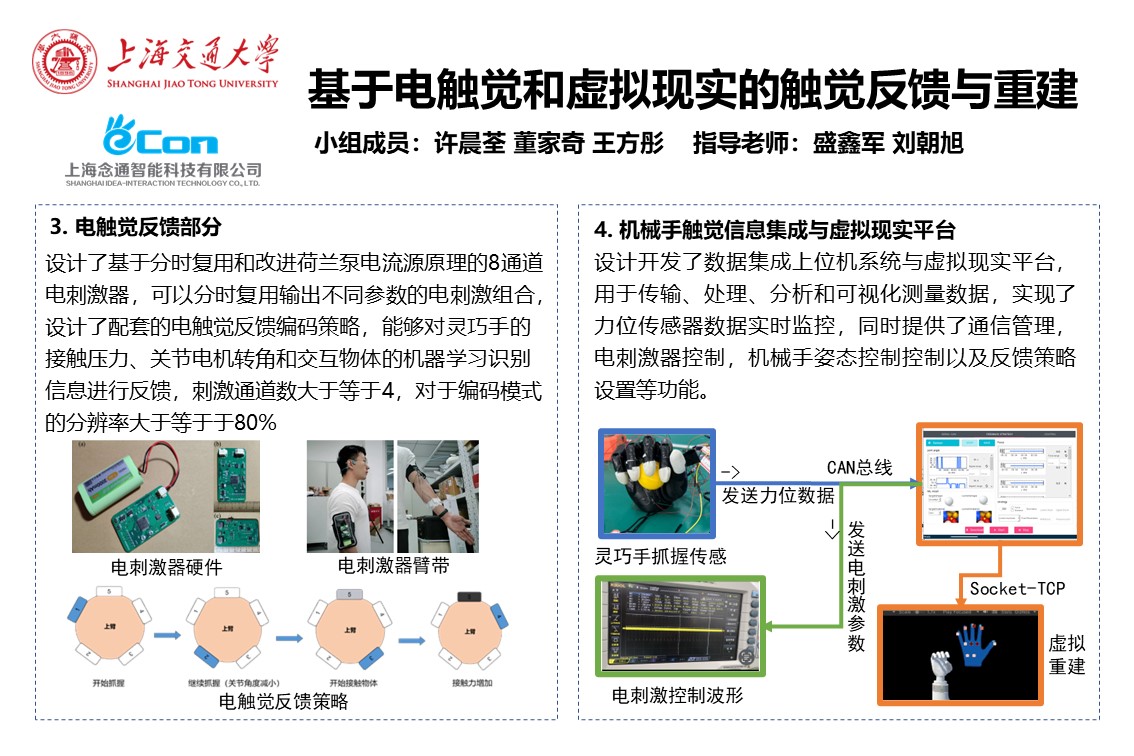
靈巧手前端部分設(shè)計實現(xiàn)了能夠同時采集并傳輸10個壓力傳感器信息和3個電機(jī)角度信息的混合感知系統(tǒng),并建立了一個含有 2 層隱藏層的神經(jīng)網(wǎng)絡(luò)來實現(xiàn)對8種抓握物體的識別;電觸覺反饋系統(tǒng)設(shè)計實現(xiàn)了基于分時復(fù)用和改進(jìn)荷蘭泵電流源原理的8通道小型化電刺激器以及配套的電觸覺反饋編碼策略,能夠?qū)`巧手的接觸壓力、關(guān)節(jié)電機(jī)轉(zhuǎn)角和交互物體的機(jī)器學(xué)習(xí)識別信息進(jìn)行反饋;開發(fā)了數(shù)據(jù)集成上位機(jī)系統(tǒng)與虛擬現(xiàn)實平臺,用于傳輸、處理、分析和可視化測量數(shù)據(jù),實現(xiàn)了力位傳感器數(shù)據(jù)實時監(jiān)控,同時提供了通信管理,電刺激器控制,機(jī)械手姿態(tài)控制控制以及反饋策略設(shè)置等功能。




