

基于力反饋的機械臂主從控制技術(shù)研究與應用
機械工程
資助企業(yè):
 上海智能制造功能平臺有限公司
上海智能制造功能平臺有限公司
資助年份: 2023
企業(yè)導師: 吳俊生

指導教師: 張偉軍
項目成員: 馬鑫、楊子驍、張大容
 項目海報
項目海報

 項目視頻
項目視頻
 項目簡介
項目簡介
項目概述
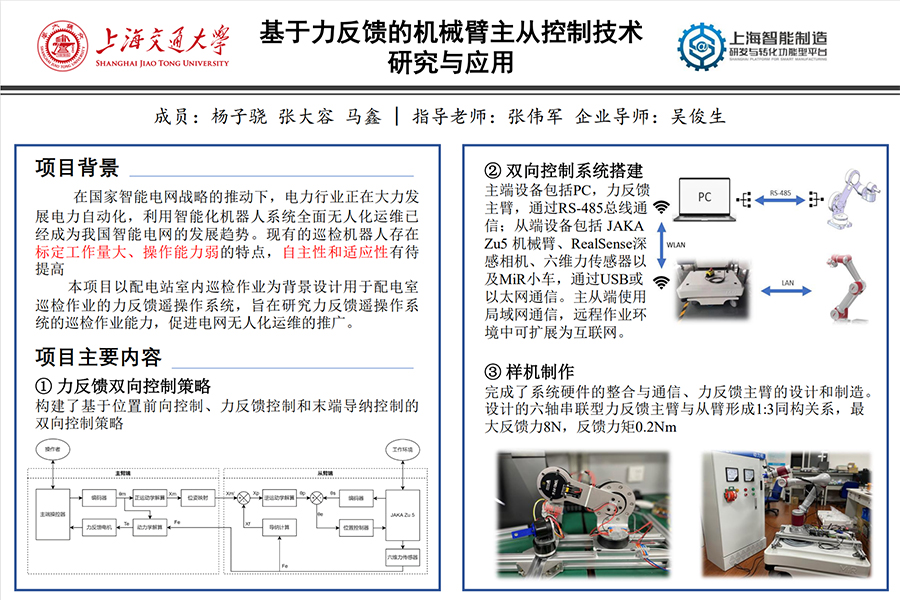
變電站巡檢機器人是一種電力作業(yè)特種機器人,能夠替代人力執(zhí)行設(shè)備巡檢、維護操作等電力運維任務,有助于實現(xiàn)電力設(shè)施無人化運維。現(xiàn)有變電站巡檢機器人存在自主能力低、操作能力弱的問題,具體表現(xiàn)為對前期人工標定依賴性大、對環(huán)境適應性差、缺少人工干預手段和突發(fā)事故情況應對機制。為此項目組開展了基于遙操作的電力作業(yè)技術(shù)研究,引入基于力反饋的遙操作技術(shù)提升巡檢操作機器人的操作能力和適應性;設(shè)計了基于深度學習的機械臂視覺引導自動趨近系統(tǒng),提升機器人的自主性。
項目目標
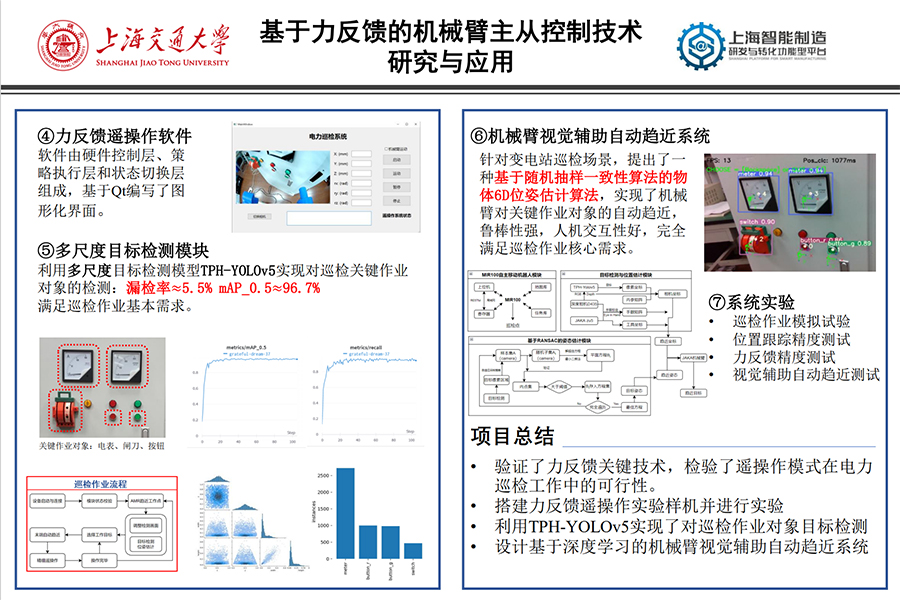
項目期望實現(xiàn)“機器人操作擬人化”及“人機協(xié)同可控化”的最終目標,提供遙操作沉浸感和臨場感,實現(xiàn)操作者遠程操作的人機共融一體化工作模式,減少從業(yè)者的勞動強度。通過搭建遙操作實驗平臺,探索遙操作模式對電力作業(yè)的可行性;設(shè)計基于深度學習的圖像識別與位姿估計系統(tǒng),賦予機器人對目標識別和自主趨近能力,提高巡檢作業(yè)的自主性。
項目成果
初步完成變電站力反饋遙操作巡檢機器人系統(tǒng)的設(shè)計與制作,其中包括:搭建了同構(gòu)串聯(lián)型六自由度遙操作平臺;制定并實現(xiàn)了主從雙向控制控制策略;編寫了帶人機交互界面的遙操作軟件;完成了遙操作平臺典型巡檢作業(yè)任務試驗;設(shè)計了基于深度學習的目標檢測系統(tǒng)與基于深度相機的機械臂自動趨近系統(tǒng),實現(xiàn)了對變電站典型作業(yè)對象的目標檢測以及機械臂末端對目標作業(yè)對象的自動趨近;設(shè)計了AMR巡檢控制系統(tǒng),實現(xiàn)了AMR對指定巡檢點位的自動趨近。




