

考慮主客觀感知評(píng)估的智能駕駛?cè)藱C(jī)共駕方法研究
機(jī)械工程
資助企業(yè):
 上海人工智能研究院有限公司
上海人工智能研究院有限公司
資助年份: 2024
企業(yè)導(dǎo)師: 王資凱

指導(dǎo)教師: 胡川
項(xiàng)目成員: 楊晨昊 馬凌 李博文 余晨曦
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目視頻
 項(xiàng)目簡介
項(xiàng)目簡介
項(xiàng)目概述
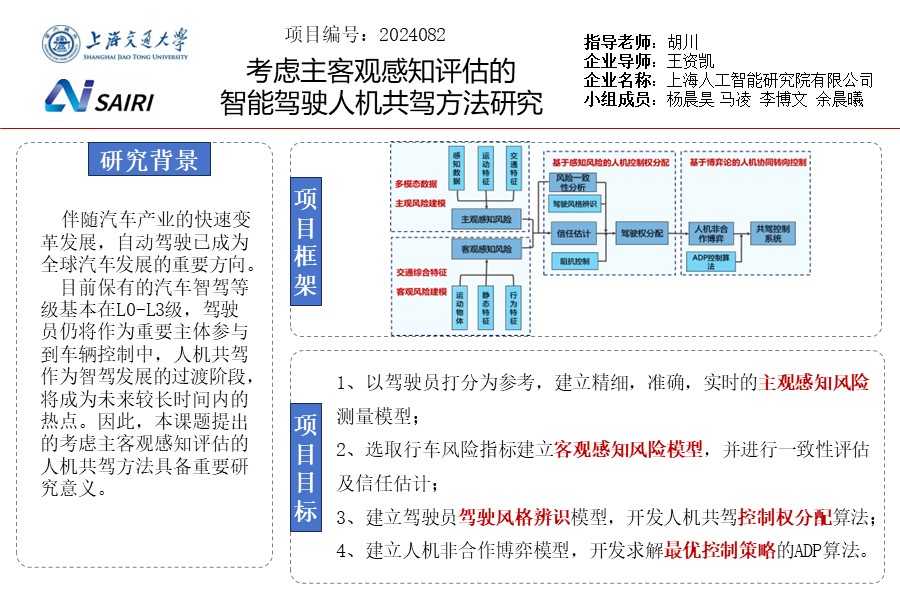
伴隨汽車產(chǎn)業(yè)的快速變革發(fā)展,自動(dòng)駕駛已成為全球汽車發(fā)展的重要方向。目前保有的汽車智駕等級(jí)基本在L0-L3級(jí),駕駛員仍將作為重要主體參與到車輛控制中,人機(jī)共駕作為智駕發(fā)展的過渡階段,將成為未來較長時(shí)間內(nèi)的熱點(diǎn)。據(jù)此本項(xiàng)目設(shè)計(jì)了一套考慮主客觀感知評(píng)估的人機(jī)共駕方法:構(gòu)建了一個(gè)考慮主客觀風(fēng)險(xiǎn)的信任估計(jì)模型,并在此模型的基礎(chǔ)上設(shè)計(jì)人機(jī)控制權(quán)分配策略,最終基于博弈思想實(shí)現(xiàn)控制策略,形成一套完整的基于主客觀風(fēng)險(xiǎn)的人機(jī)共駕協(xié)同控制方法,提升自動(dòng)駕駛系統(tǒng)的安全性、可靠性。
項(xiàng)目目標(biāo)
本項(xiàng)目擬建立一套考慮主客觀感知評(píng)估的智能駕駛?cè)藱C(jī)共駕系統(tǒng),其中包含感知風(fēng)險(xiǎn)預(yù)測模型,考慮主客觀風(fēng)險(xiǎn)一致性的信任估計(jì)模型,人機(jī)共駕控制權(quán)分配模型,人機(jī)協(xié)同轉(zhuǎn)向控制算法部分,具體目標(biāo)如下:
1、以駕駛員打分為參考,建立精細(xì),準(zhǔn)確,實(shí)時(shí)的主觀感知風(fēng)險(xiǎn)測量模型;
2、選取行車風(fēng)險(xiǎn)指標(biāo)建立客觀感知風(fēng)險(xiǎn)模型,并進(jìn)行一致性評(píng)估及信任估計(jì)
3、建立駕駛員駕駛風(fēng)格辨識(shí)模型,開發(fā)人機(jī)共駕控制權(quán)分配算法。
4、建立人機(jī)非合作博弈模型,開發(fā)求解最優(yōu)控制策略的ADP算法
項(xiàng)目成果
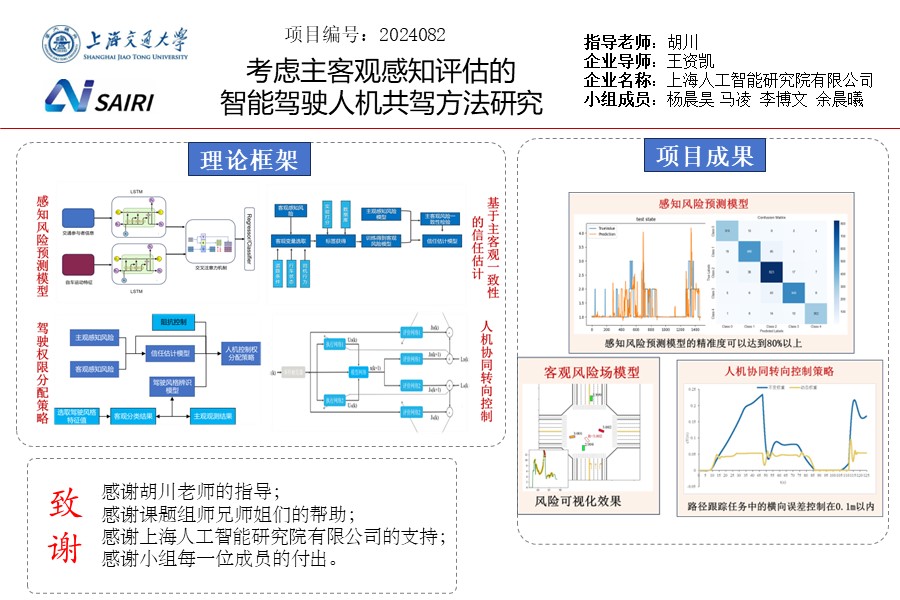
本項(xiàng)目成功設(shè)計(jì)了一套智能駕駛?cè)藱C(jī)共駕系統(tǒng),具體成果如下:
1、綜合考慮主客觀多模態(tài)數(shù)據(jù),設(shè)計(jì)了一套基于LSTM的精準(zhǔn)的感知風(fēng)險(xiǎn)預(yù)測模型,并設(shè)計(jì)了交互關(guān)系模塊和個(gè)性化建模方法,最終的預(yù)測精準(zhǔn)度達(dá)到80%以上;
2、構(gòu)建多維度客觀風(fēng)險(xiǎn)模型,加入行車軌跡預(yù)測模塊,完成當(dāng)天及未來時(shí)刻的風(fēng)險(xiǎn)預(yù)測。構(gòu)建主客觀風(fēng)險(xiǎn)一致性評(píng)價(jià)方法與主客觀信任模型提升人機(jī)交互安全性及可靠性。
3、建立駕駛風(fēng)格辨識(shí)模型,并結(jié)合感知風(fēng)險(xiǎn)和信任估計(jì)模型,基于強(qiáng)化學(xué)習(xí)的方式,得出實(shí)時(shí)的人機(jī)駕駛權(quán)重分配策略。
4、設(shè)計(jì)了人機(jī)非合作博弈框架,采用基于事件觸發(fā)的自適應(yīng)動(dòng)態(tài)規(guī)劃算法求解控制策略,并基于量化指標(biāo)設(shè)計(jì)了動(dòng)態(tài)權(quán)重分配策略,將路徑跟蹤任務(wù)中的橫向誤差控制在0.1m以內(nèi)




