

旋翼機(jī)器人主動(dòng)視覺及其協(xié)作系統(tǒng)設(shè)計(jì)
機(jī)械工程
資助企業(yè):
 上海市特種設(shè)備監(jiān)督檢驗(yàn)技術(shù)研究院
上海市特種設(shè)備監(jiān)督檢驗(yàn)技術(shù)研究院
資助年份: 2024
企業(yè)導(dǎo)師: 陳慶誠

指導(dǎo)教師: 董偉
項(xiàng)目成員: 陳柏霖,涂天宇,黃先,張弛
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)


 項(xiàng)目視頻
項(xiàng)目視頻
 項(xiàng)目簡介
項(xiàng)目簡介
項(xiàng)目概述
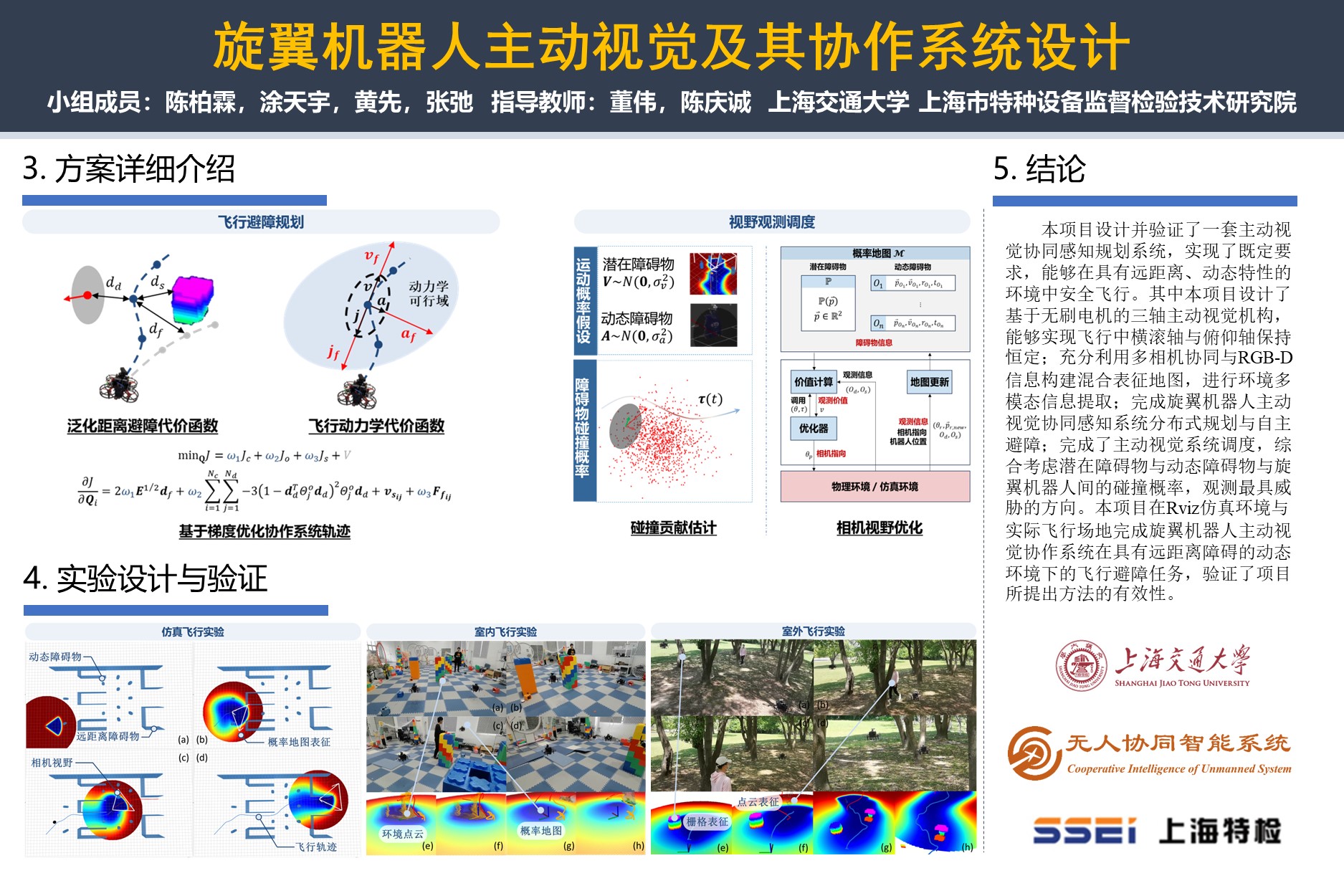
在旋翼機(jī)器人自主飛行過程中,通常會(huì)基于深度相機(jī)進(jìn)行環(huán)境感知以降低碰撞風(fēng)險(xiǎn)。然而,由于深度相機(jī)的感知距離有限,旋翼機(jī)器人難以對環(huán)境中的遠(yuǎn)距離障礙物進(jìn)行充分的感知并做出決策,最終導(dǎo)致路徑并非全局最優(yōu);且視野盲區(qū)中的動(dòng)態(tài)障礙物無法實(shí)時(shí)偵測,最終難以保證可靠的無風(fēng)險(xiǎn)安全飛行。針對上述訴求,本項(xiàng)目采用主動(dòng)視覺方案克服深度相機(jī)視野限制,持續(xù)觀測動(dòng)態(tài)障礙物,降低碰撞風(fēng)險(xiǎn);針對遠(yuǎn)距離障礙物采用協(xié)同觀測策略,拓寬觀測基線,克服感知距離限制
項(xiàng)目目標(biāo)
針對上述訴求,本項(xiàng)目設(shè)計(jì)多機(jī)協(xié)同主動(dòng)視覺協(xié)同觀測方法估計(jì)遠(yuǎn)距離障礙物并計(jì)算任務(wù)前瞻軌跡,并構(gòu)建多目標(biāo)泛化距離模型優(yōu)化旋翼機(jī)器人的軌跡,降低旋翼機(jī)器人執(zhí)行遠(yuǎn)距離任務(wù)的飛行時(shí)間;設(shè)計(jì)主動(dòng)視覺機(jī)構(gòu)控制相機(jī)旋轉(zhuǎn),利用拓?fù)鋬?yōu)化與模態(tài)分析提升機(jī)構(gòu)的輕便性與穩(wěn)定性,利用點(diǎn)云與像素系語義信息構(gòu)建動(dòng)態(tài)障礙物包絡(luò),融合靜態(tài)柵格地圖與旋翼機(jī)器人協(xié)同感知語義地圖對環(huán)境進(jìn)行多模態(tài)表征,并設(shè)計(jì)調(diào)度算法規(guī)劃主動(dòng)視覺系統(tǒng)持續(xù)觀測動(dòng)態(tài)障礙物與潛在障礙物,基于多模態(tài)表征構(gòu)建價(jià)值函數(shù)優(yōu)化調(diào)度主動(dòng)視覺機(jī)構(gòu),以提升旋翼機(jī)器人飛行穿越動(dòng)態(tài)障礙物的安全性。
項(xiàng)目成果
(1)完成主動(dòng)視覺系統(tǒng)機(jī)構(gòu)和控制算法設(shè)計(jì),實(shí)現(xiàn)主動(dòng)視覺系統(tǒng)總重不超過300 g,視野觀測清晰平穩(wěn)。
(2)完成多旋翼機(jī)器人協(xié)同的深度相機(jī)視覺處理系統(tǒng)構(gòu)建,實(shí)現(xiàn)障礙物快速分離表征、動(dòng)態(tài)障礙物狀態(tài)包絡(luò)和估計(jì)以及對遠(yuǎn)距離障礙物的表征與三角定位。
(3)完成旋翼機(jī)器人飛行規(guī)劃器設(shè)計(jì),考慮多機(jī)器人間協(xié)同飛行與動(dòng)態(tài)障礙物。相較于初始路徑,實(shí)際路徑長度縮短15%。
(4)完成主動(dòng)視覺系統(tǒng)相機(jī)軌跡規(guī)劃設(shè)計(jì),最優(yōu)化潛在動(dòng)、靜態(tài)障礙物碰撞障礙物觀測視角,耦合考慮旋翼機(jī)器人的軌跡特性與相機(jī)轉(zhuǎn)角,降低未知環(huán)境中旋翼機(jī)器人的碰撞風(fēng)險(xiǎn)。




