

配電室應(yīng)急操作機(jī)器人
機(jī)械工程
資助企業(yè):
 上海智能制造功能平臺(tái)有限公司
上海智能制造功能平臺(tái)有限公司
資助年份: 2024
企業(yè)導(dǎo)師: 吳俊生

指導(dǎo)教師: 張偉軍
項(xiàng)目成員: 唐雨晗、邵振磊、劉陽
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目視頻
 項(xiàng)目簡(jiǎn)介
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
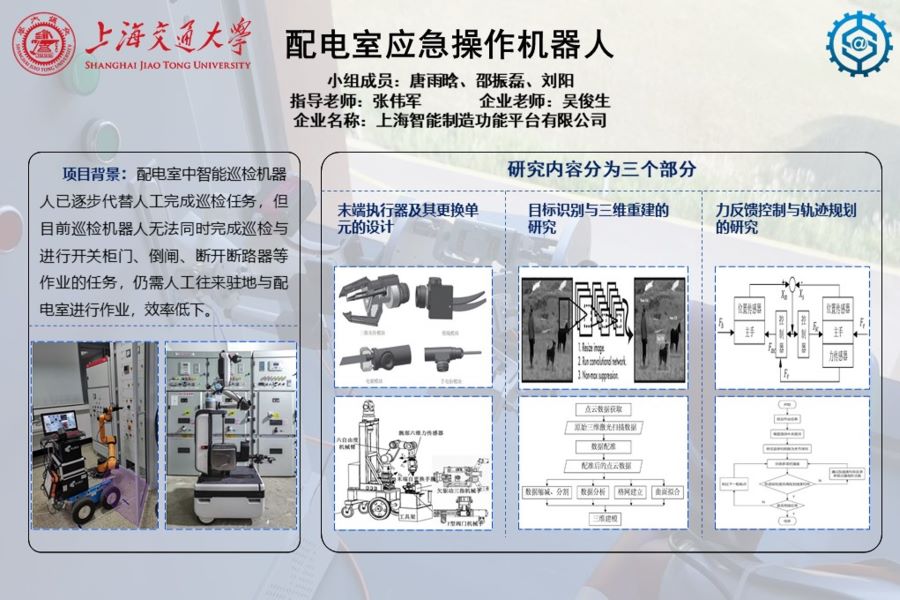
近年來,伴隨著經(jīng)濟(jì)的不斷發(fā)展以及智能電網(wǎng)概念的提出,智能巡檢機(jī)器人已逐步代替人工完成電網(wǎng)巡檢任務(wù),但目前應(yīng)用的巡檢機(jī)器人無法同時(shí)完成巡檢與進(jìn)行開關(guān)柜門、倒閘、斷開斷路器等作業(yè)的任務(wù),仍需人工往來駐地與配電室進(jìn)行作業(yè),效率低下。本項(xiàng)目旨在設(shè)計(jì)一款搭載六軸機(jī)械臂的具備自主作業(yè)能力與遙操作功能的機(jī)器人,其能夠?qū)ε潆娛业碾娏ζ骷M(jìn)行標(biāo)識(shí)并進(jìn)行路徑規(guī)劃,完成抄表、故障檢測(cè)等巡檢作業(yè),同時(shí)能通過遙操作的方式控制機(jī)器人完成開關(guān)柜門、倒閘、斷開斷路器等復(fù)雜作業(yè)。
項(xiàng)目目標(biāo)
1. 根據(jù)機(jī)器人在巡檢中的開柜門、倒閘等作業(yè)的力,位置要求,設(shè)計(jì)相應(yīng)的末端執(zhí)行器以自動(dòng)化地完成相應(yīng)作業(yè)任務(wù)。
2. 完成電柜元器件的目標(biāo)識(shí)別,實(shí)現(xiàn)巡檢機(jī)器人對(duì)環(huán)境的語義分割;完成對(duì)識(shí)別目標(biāo)的定位,獲取三維位姿;完成對(duì)變電柜的unity-3d三維重建
3. 對(duì)從端機(jī)械臂進(jìn)行軌跡規(guī)劃,實(shí)現(xiàn)應(yīng)急情況下自主完成倒閘、開柜門等復(fù)雜操作的功能,搭建主從遙操作力反饋系統(tǒng),實(shí)現(xiàn)力反饋功能與末端導(dǎo)納控制功能。
項(xiàng)目成果
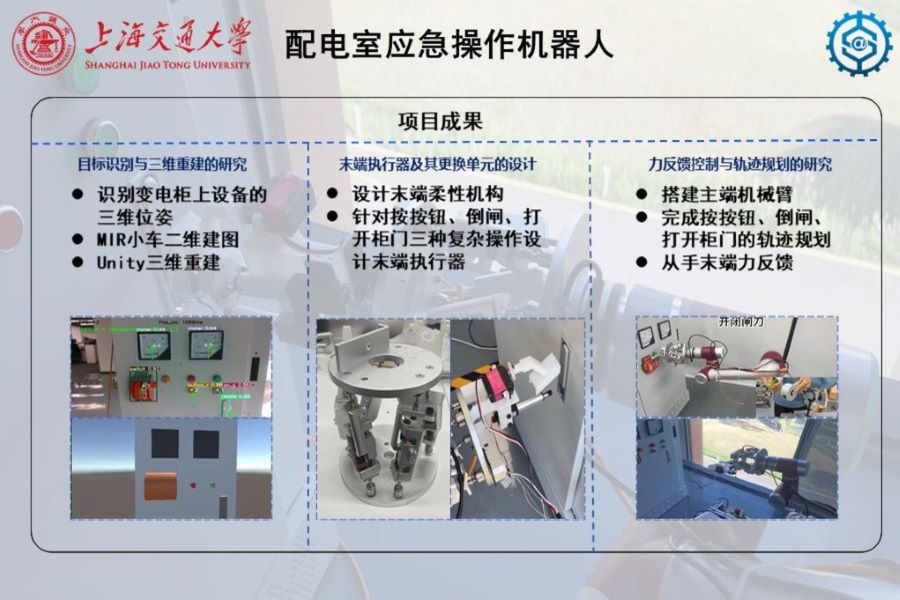
設(shè)計(jì)了一款六自由度被動(dòng)柔順平臺(tái),實(shí)現(xiàn)了對(duì)機(jī)械臂末端反作用力的調(diào)控;完成了開柜門末端執(zhí)行器的設(shè)計(jì)與制造;完成了拉閘刀末端執(zhí)行器的設(shè)計(jì)與制造。
搭建了電力柜設(shè)備三位位姿目標(biāo)識(shí)別系統(tǒng),實(shí)現(xiàn)了對(duì)電力柜上儀表、閘刀、門鎖等目標(biāo)的三維位姿識(shí)別;完成MIR小車二維建圖;完成基于Unity 3D配電室環(huán)境三維重建。
搭建了用于主從遙操作的1:2主臂;設(shè)計(jì)了主從遙操作從臂力反饋系統(tǒng);完成了機(jī)械臂進(jìn)行拉閘刀、開柜門操作的軌跡規(guī)劃。




