

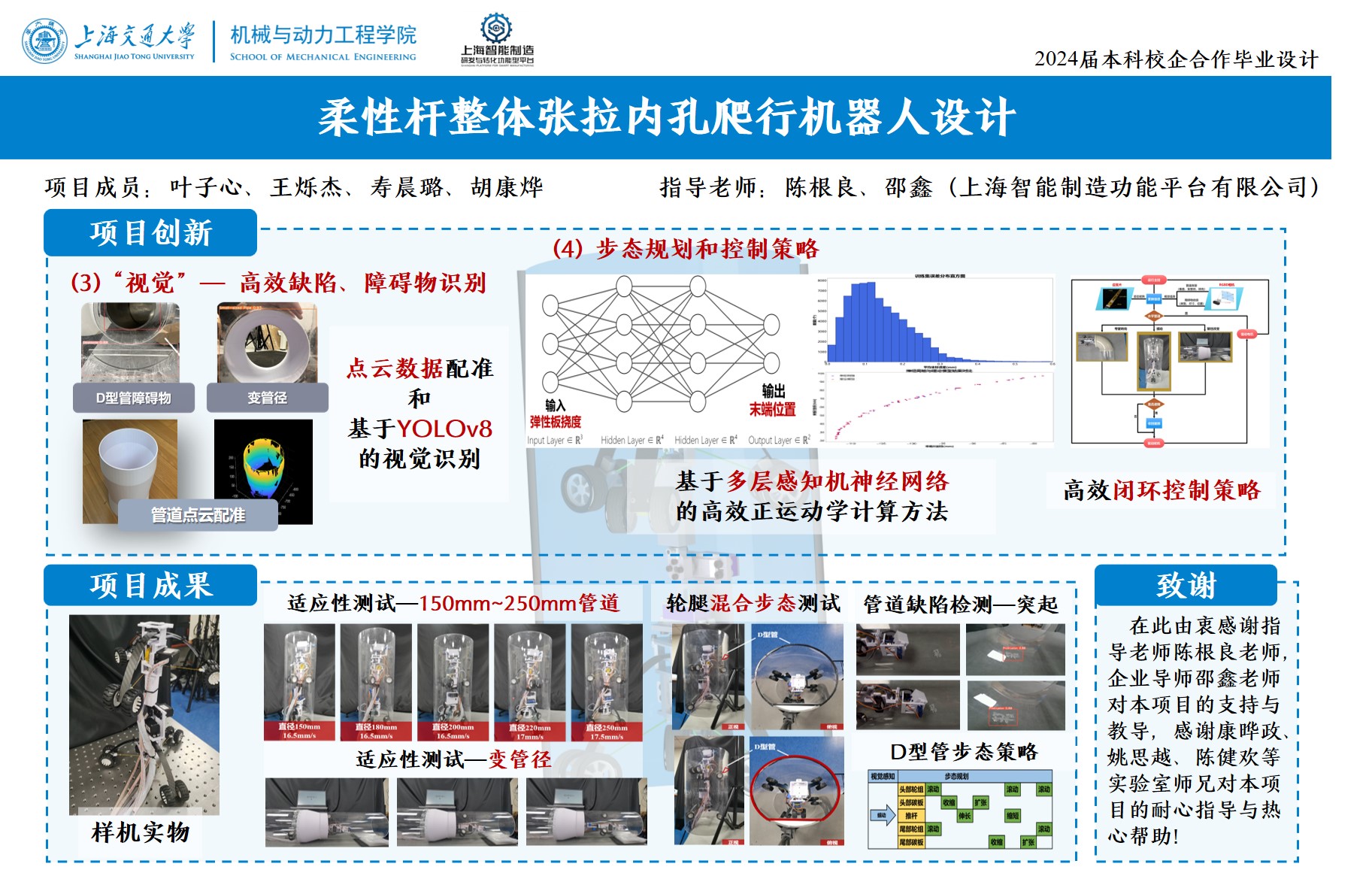
柔性桿整體張拉內(nèi)孔爬行機(jī)器人設(shè)計(jì)
機(jī)械工程
資助企業(yè):
 上海智能制造功能平臺(tái)有限公司
上海智能制造功能平臺(tái)有限公司
資助年份: 2024
企業(yè)導(dǎo)師: 邵鑫

指導(dǎo)教師: 陳根良
項(xiàng)目成員: 葉子心 王爍杰 壽晨璐 胡康燁
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)


 項(xiàng)目視頻
項(xiàng)目簡介
項(xiàng)目視頻
項(xiàng)目簡介
項(xiàng)目概述
在航空航天飛行器的發(fā)動(dòng)機(jī)等復(fù)雜系統(tǒng)中,包含大量直徑曲率不同、輸送水、氣的管道。為避免事故發(fā)生,管道需定期檢測、探傷、維護(hù)。內(nèi)孔爬行機(jī)器人可以代替人員進(jìn)入狹窄危險(xiǎn)的管道進(jìn)行探測,而適應(yīng)性強(qiáng)、檢出率高是這類機(jī)器人的核心要求。本項(xiàng)目將彈性板引入機(jī)器人設(shè)計(jì),利用彈性板大變形和整體張拉構(gòu)型設(shè)計(jì)制造一款新型內(nèi)孔爬行機(jī)器人,能夠?qū)崿F(xiàn)復(fù)雜管道輪腿雙模式爬行和管道內(nèi)障礙缺陷識(shí)別。
項(xiàng)目目標(biāo)
(1)運(yùn)動(dòng)能力方面,實(shí)現(xiàn)復(fù)雜管道的輪腿雙模式運(yùn)行,能夠通過圓管,D型管等;越障能力方面能越過或者避開裂縫、突起等。
(2)觸覺感知方面,利用貼附在彈性板表面的應(yīng)變片提供機(jī)器人姿態(tài)信息。
(3)視覺識(shí)別方面,利用視覺系統(tǒng)組件對(duì)管道內(nèi)部情況進(jìn)行特征提取和識(shí)別,提供機(jī)器人下一步運(yùn)動(dòng)的決策數(shù)據(jù)。
(4)步態(tài)規(guī)劃與控制方面,通過觸覺、視覺感知系統(tǒng)數(shù)據(jù)和機(jī)器人當(dāng)前位姿,得到驅(qū)動(dòng)信息,實(shí)現(xiàn)高精度、高魯棒性的運(yùn)動(dòng)控制。
項(xiàng)目成果
(1) 本項(xiàng)目完成了柔性桿整體張拉內(nèi)孔爬行機(jī)器人設(shè)計(jì)與制造,實(shí)現(xiàn)了直徑150mm~250mm復(fù)雜管道的輪腿雙模式運(yùn)動(dòng),具有較高的靈活性和適應(yīng)性。
(2) 本項(xiàng)目建立了彈性板大變形模型,設(shè)計(jì)了多通道集成的應(yīng)變片電壓采集系統(tǒng),利用冗余數(shù)量傳感器實(shí)現(xiàn)機(jī)器人位姿精準(zhǔn)實(shí)時(shí)獲取。
(3) 本項(xiàng)目基于YOLOv8算法實(shí)現(xiàn)了管道缺陷和障礙物類型的高效識(shí)別,并通過點(diǎn)云數(shù)據(jù)配準(zhǔn)實(shí)現(xiàn)局部管道環(huán)境重建。
(4) 本項(xiàng)目設(shè)計(jì)了基于多層感知機(jī)神經(jīng)網(wǎng)絡(luò)的高效正運(yùn)動(dòng)學(xué)計(jì)算方法和高效閉環(huán)控制策略,實(shí)現(xiàn)步態(tài)規(guī)劃和精準(zhǔn)控制。




