

基于ROS2的智能小車開發(fā)
機械工程資助企業(yè): 弗祐機器人科技(上海)有限公司
資助年份: 2024
企業(yè)導師: 邵云龍

指導教師: 黃宏成
項目成員: 王金杰 曹勛
 項目海報
項目海報

 項目視頻
項目視頻
 項目簡介
項目簡介
項目概述
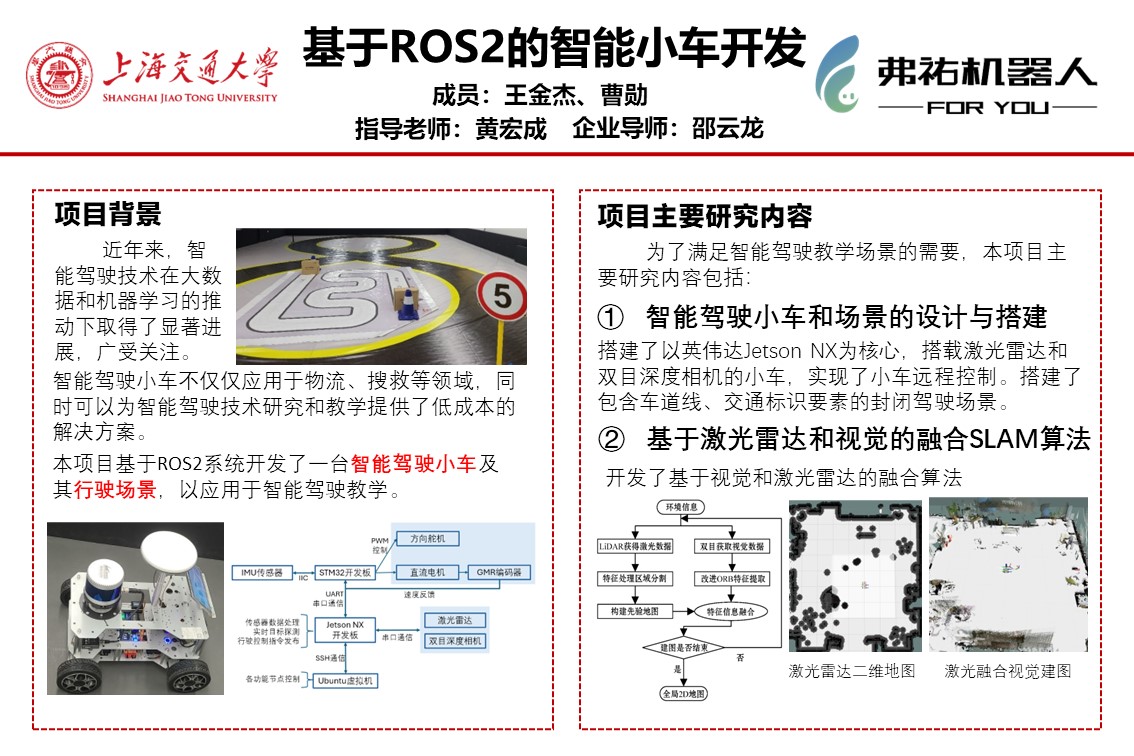
智能駕駛技術是當今汽車行業(yè)的前沿領域,其在提高交通安全、減少交通擁堵、改善駕駛體驗等方面具有重要意義。而搭載深度相機、激光雷達等傳感器的智能駕駛小車所包含的技術與真實道路場景下的自動駕駛有著異曲同工之處,其對于融合SLAM算法、交通標志探測、車道線識別等方面的研究都能夠?qū)χ悄荞{駛技術的研究有所啟發(fā)。本項目旨在開發(fā)一款基于ROS2的智能小車及其行駛環(huán)境,通過集成各種傳感器和執(zhí)行器,實現(xiàn)環(huán)境感知、自主行駛和導航,以供智能駕駛教學使用。
項目目標
通過集成各種傳感器和執(zhí)行器,小車能夠感知周圍環(huán)境并做出相應的決策和行動。期望結(jié)果包括以下幾個方面:
自主導航能力:小車能夠根據(jù)預設的路徑或?qū)崟r規(guī)劃的路徑進行自主導航,包括前進、后退、轉(zhuǎn)彎等基本動作。
避障能力:小車能夠通過感知傳感器檢測到周圍的障礙物,并采取相應的避障策略,如改變方向、減速等,以避免與障礙物碰撞。
多傳感器融合能力:小車能夠?qū)⒍喾N傳感器的數(shù)據(jù)進行融合,提高對環(huán)境的感知精度和穩(wěn)定性,從而更好地完成任務。
環(huán)境感知能力:小車能夠?qū)崟r探測環(huán)境內(nèi)的交通標識,并根據(jù)探測結(jié)果做出反饋。
項目成果
項目設計并搭建了一臺基于ROS2系統(tǒng)的,配備激光雷達和深度相機的智能小車,搭建了包含車道線、交通表示等要素的行駛環(huán)境
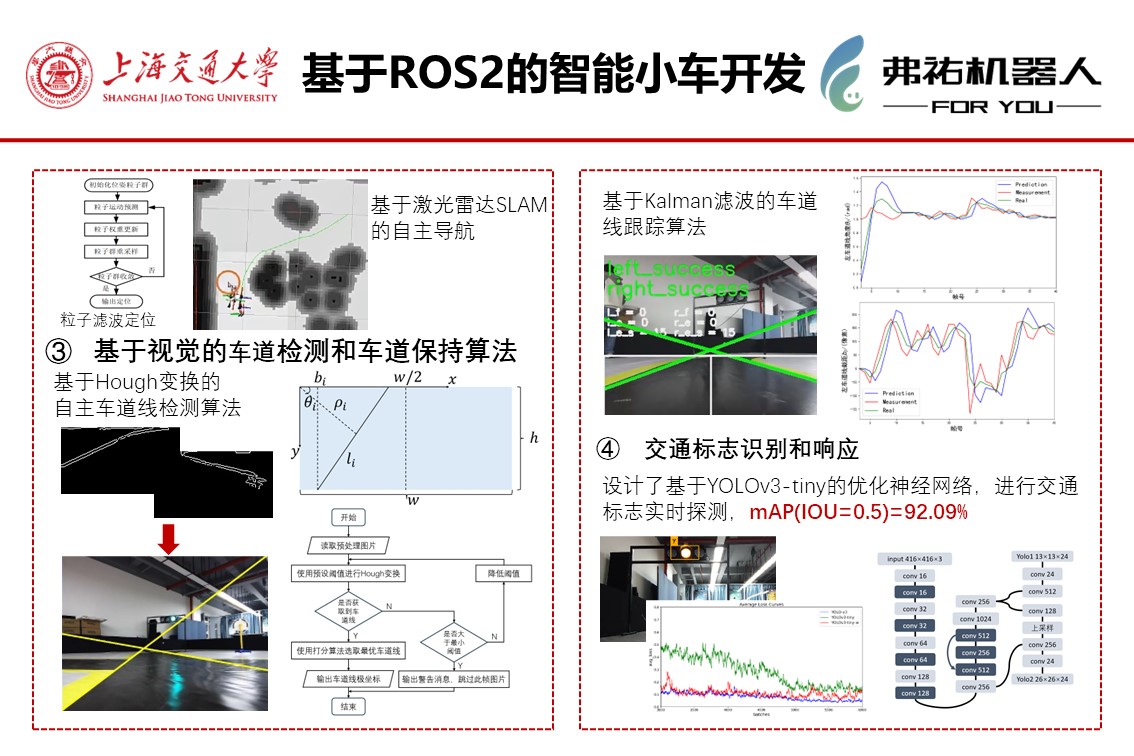
開發(fā)了激光雷達和視覺融合的SLAM算法:實現(xiàn)了激光雷達視覺融合建圖,實現(xiàn)了小車粒子濾波定位,實現(xiàn)了基于激光雷達的自主導航。
開發(fā)了基于Hough變換和Kalman濾波的車道線跟蹤算法,實現(xiàn)了小車巡線行駛。設計了優(yōu)化的YOLOv3-tiny目標探測模型,實現(xiàn)了交通標志實時探測和小車響應算法。




