

面向裝配任務的機器人測量與軌跡優(yōu)化
最受歡迎獎
資助企業(yè):
 上汽大眾汽車有限公司
上汽大眾汽車有限公司
資助年份: 2023
企業(yè)導師: 嚴海橋

指導教師: 丁燁
項目成員: 應昊澄 陳煒昊 林揚捷
 項目海報
項目海報

 項目視頻
項目簡介
項目視頻
項目簡介
項目概述
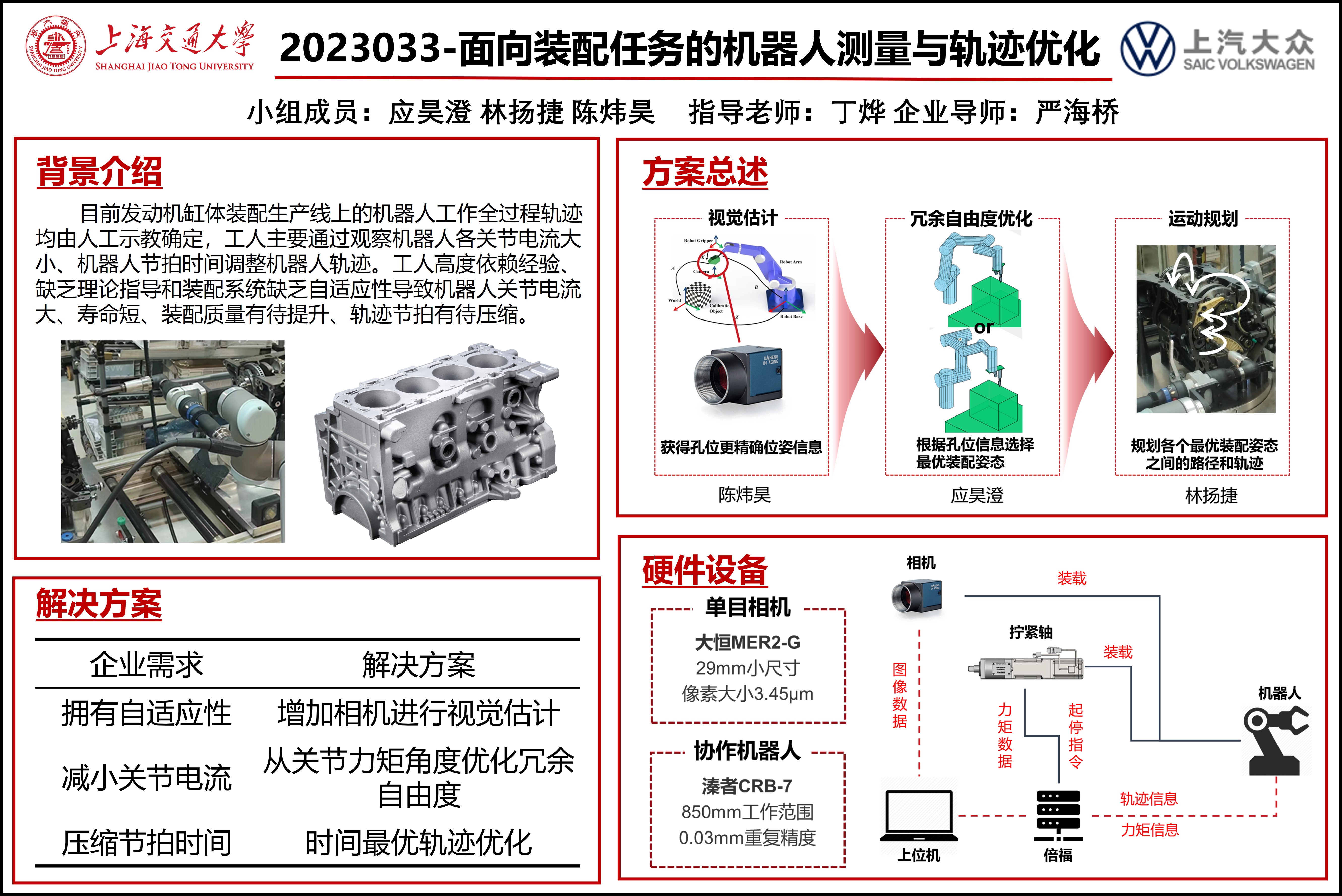
本項目源于大眾在生產(chǎn)過程中遇到的一個實際問題:目前發(fā)動機缸體裝配生產(chǎn)線上的機器人工作全過程軌跡均由人工示教確定,工人主要通過觀察機器人各關節(jié)電流大小、機器人節(jié)拍時間調整機器人軌跡。工人高度依賴經(jīng)驗、缺乏理論指導和裝配系統(tǒng)缺乏自適應性導致機器人關節(jié)電流大、壽命短、裝配質量有待提升、軌跡節(jié)拍有待壓縮。本項目擬面向發(fā)動機缸體裝配場景優(yōu)化機器人工作軌跡,通過視覺方式獲得更精確工件位姿信息;優(yōu)化關節(jié)力矩,以減小關節(jié)電流;根據(jù)孔位分布信息規(guī)劃整條裝配路線,完成裝配任務并提高裝配生產(chǎn)效率。
項目目標
(1)在機器人末端執(zhí)行器上加裝相機,獲取工件、模型孔位的位姿精確信息,使得裝配系統(tǒng)對工件位姿偏置具有自適應性,提高裝配成功率。
(2)提出評估機器人關節(jié)力矩的指標,基于指標優(yōu)化機器人裝配時的冗余自由度,獲得最優(yōu)姿態(tài)。
(3)規(guī)劃不同裝配點位之間路徑、軌跡,提高裝配生產(chǎn)效率,新軌跡節(jié)拍壓縮5-20%。
項目成果
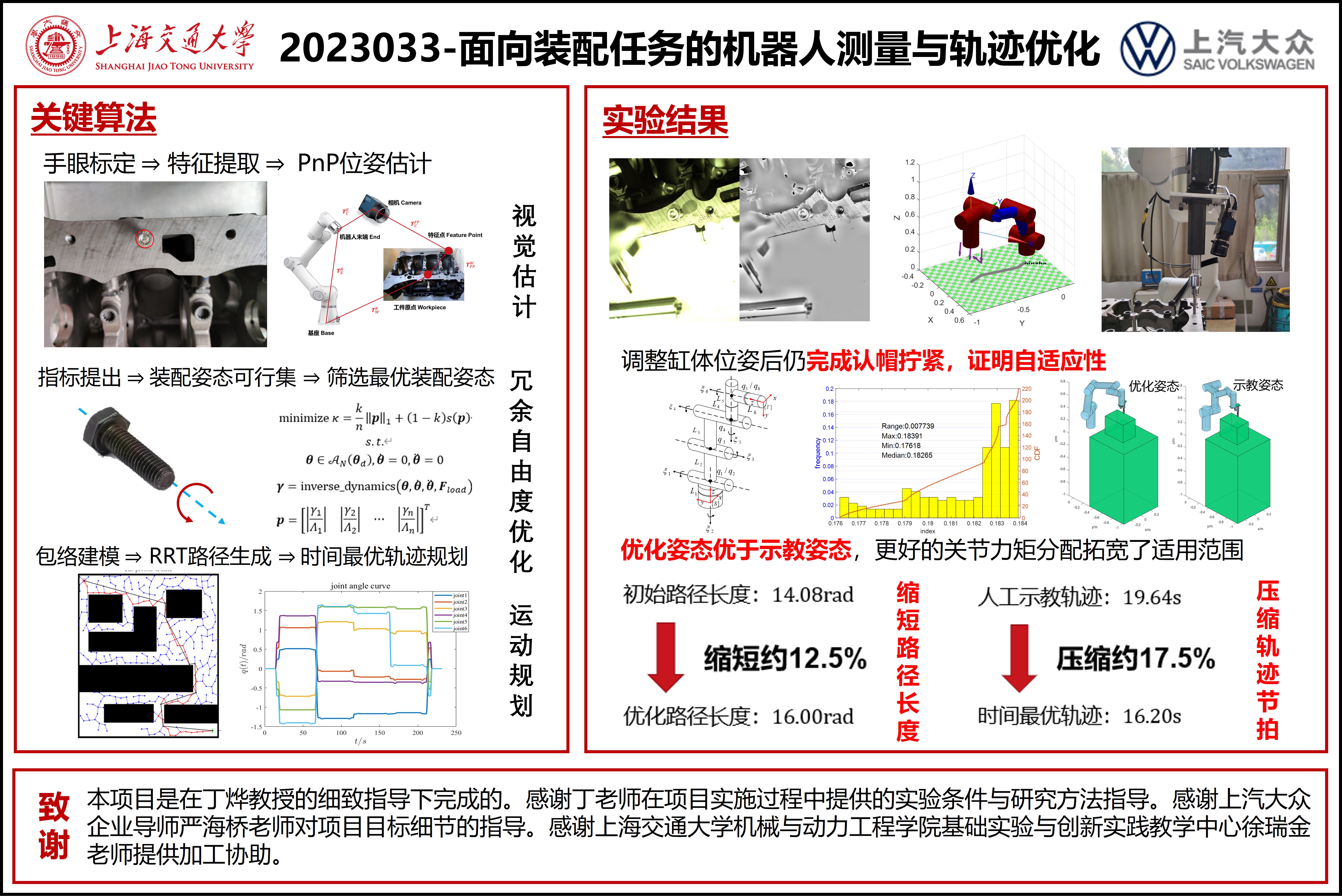
(1)提出了一種基于單目相機的視覺估計方案,提升了系統(tǒng)的魯棒性。結合高效的相機自標定、特征提取以及位姿估計方案可以自行適應不同批次工件。
(2)提出了評價機器人關節(jié)力矩的指標,并基于指標設計了一種優(yōu)化機器人裝配姿態(tài)冗余自由度的方案,解算出在指標意義下的最優(yōu)裝配姿態(tài),使得機器人關節(jié)力矩盡可能小且均一。
(3)設計并實現(xiàn)了裝配軌跡自動生成方案。在已知工件裝配點位坐標和環(huán)境障礙物信息的前提下,自動生成高效、安全的裝配軌跡。生成軌跡相較于傳統(tǒng)示教方法時間顯著縮短,有效壓縮了工作節(jié)拍。




