

利用增強現(xiàn)實技術的腦控自滾動小球系統(tǒng)設計
最受歡迎獎
資助企業(yè):
 上海念通智能科技有限公司
上海念通智能科技有限公司
資助年份: 2023
企業(yè)導師: 劉朝旭

指導教師: 孟建軍
項目成員: 吉明浩、石尚、朱孟陽
 項目海報
項目海報

 項目視頻
項目視頻
 項目簡介
項目簡介
項目概述
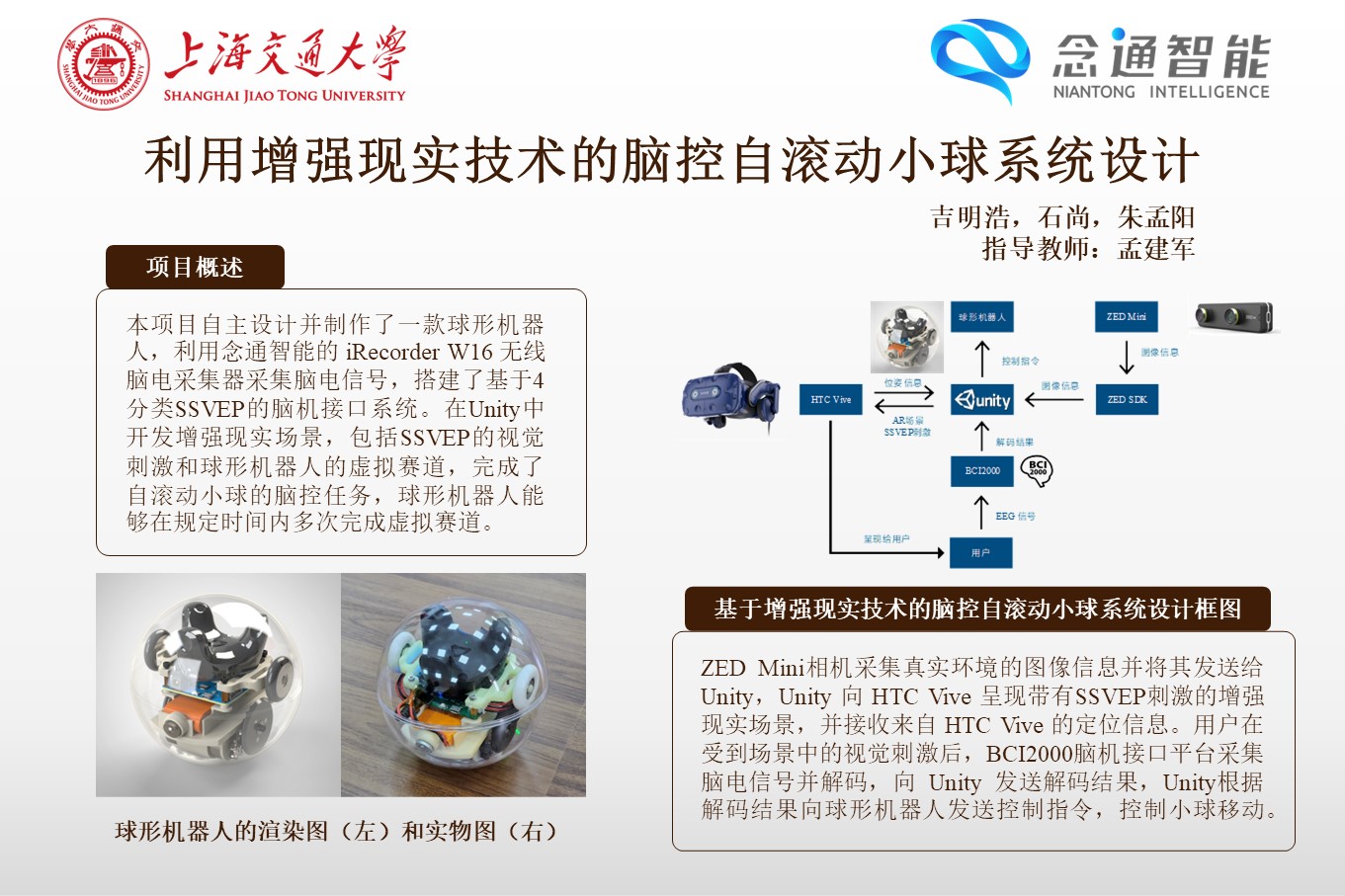
本項目面向腦控自滾動球形機器人交互場景,設計制作一款球形機器人,在SJT腦機接口系統(tǒng)的基礎上,利用念通智能的 iRecorder W16 無線腦電采集器,使用BCI2000腦機接口系統(tǒng)平臺,設計、開發(fā)并搭建基于增強現(xiàn)實的腦控界面,裁剪相應的穩(wěn)態(tài)視覺誘發(fā)電位SSVEP并解碼得到結果,同時運用Unity建立增強現(xiàn)實場景,實現(xiàn)視覺刺激和虛擬賽道,完成自滾動小球的腦控任務,在規(guī)定時間內(nèi)完成規(guī)定的賽道軌跡。
項目目標
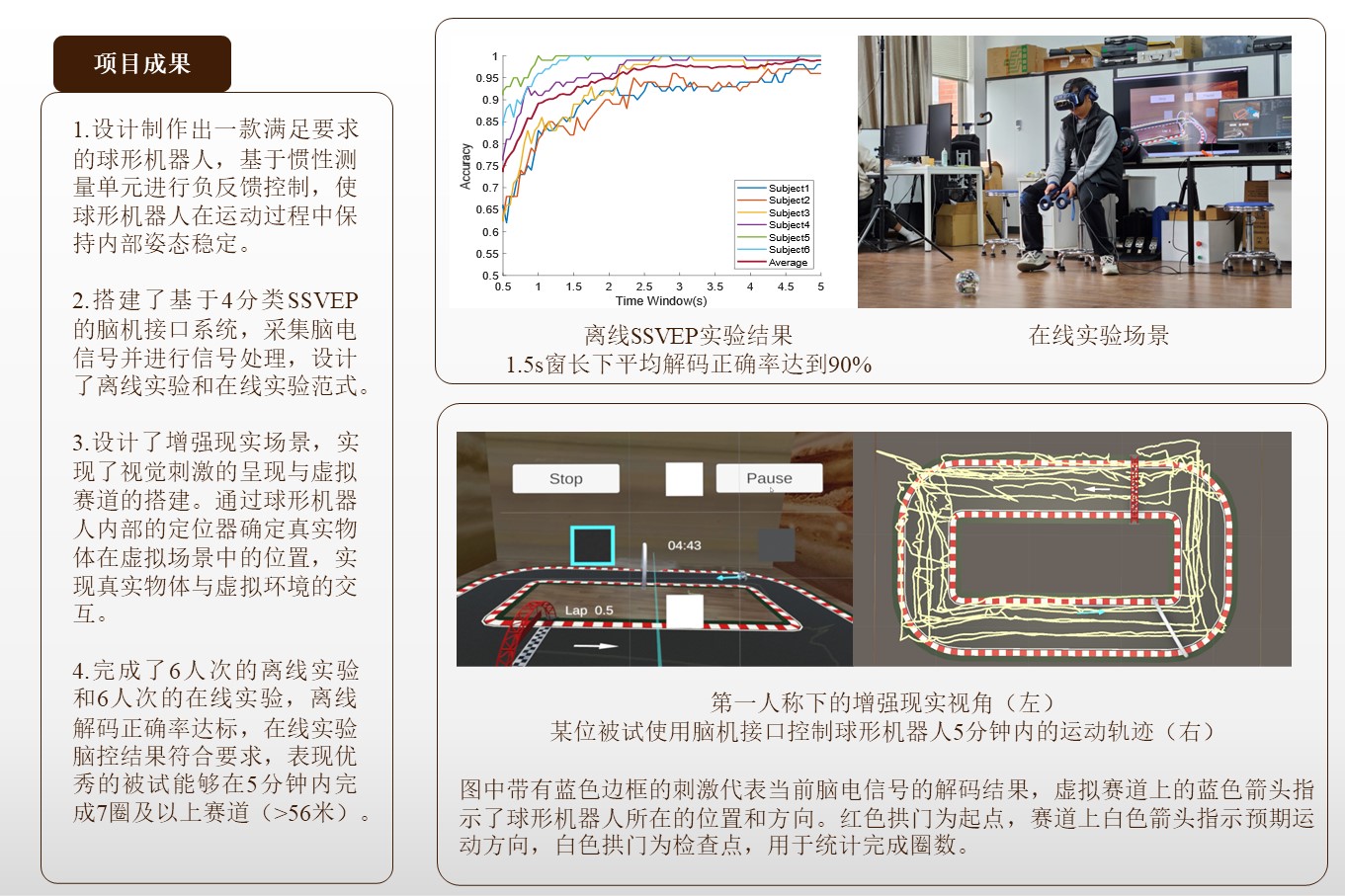
本項目要求球形機器人處于封閉球形空間內(nèi),具備透明外殼,直徑在 8-20cm 之間,重量在 2kg 以內(nèi),外殼可拆卸并具備一定密封性。機器人能夠使用藍牙通信或使用無線網(wǎng)通信,可靠通信距離不小于15米,使用合理的控制算法控制球形機器人穩(wěn)定運動。機器人的腦機接口系統(tǒng)要求受試者的4類SSVEP平均解碼正確率大于85%,完成5人次以上在線腦控球形機器人實驗。借助增強現(xiàn)實設備,設計人機交互界面,識別球形機器人的位置并控制球形機器人在場景內(nèi)進行運動。
項目成果
本項目實現(xiàn)了以下成果:
1. 設計制作出一款滿足目標要求的球形機器人,可以實現(xiàn)穩(wěn)定運動。
2. 搭建了腦機接口系統(tǒng),用于信號采集與信號處理,設計了離線實驗和在線實驗范式。
3. 建立了增強現(xiàn)實場景,實現(xiàn)了視覺刺激的呈現(xiàn)與虛擬賽道的搭建。
4. 實現(xiàn)了各系統(tǒng)模塊間信息的通信與聯(lián)系,驗證了系統(tǒng)的可行性和穩(wěn)定性。
5. 完成了6人次的離線實驗和6人次的在線實驗,離線解碼正確率達標,在線實驗腦控結果符合要求。




