
5月21日至26日,機(jī)器人領(lǐng)域國際頂級會議IEEE International Conference on Robotics and Automation (ICRA 2018)在澳大利亞召開,來自全球60余個國家的3000多名專家參加了此次會議。本屆ICRA舉辦了類型豐富的機(jī)器人挑戰(zhàn)賽,上海交通大學(xué)“KaiBot”智能機(jī)器人代表隊入圍其中的“Tidy up my room challenge”挑戰(zhàn)賽總決賽,順利完成比賽任務(wù),抓取成功率100%,成為唯一一支完成任務(wù)的隊伍。
?
?
“KaiBot”智能機(jī)器人代表隊依托上海交通大學(xué)-FANUC工業(yè)機(jī)器人智能化技術(shù)聯(lián)合實驗室,由我院特聘教授彭穎紅團(tuán)隊學(xué)生及電子信息與電氣工程學(xué)院特別研究員盧策吾團(tuán)隊學(xué)生組成。
?

?
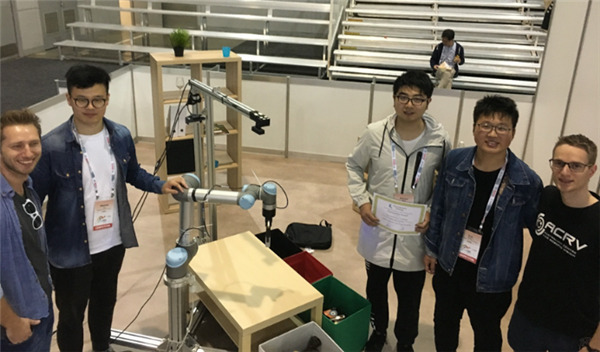
家居環(huán)境中機(jī)器人抓取和操作物體是未來機(jī)器人應(yīng)用的典型問題。“Tidy up my room challenge”挑戰(zhàn)賽為期三天,聚焦于生活場景中的機(jī)器人自主房間整理任務(wù)。比賽中,“KaiBot”智能機(jī)器人團(tuán)隊采用基于深度學(xué)習(xí)的多攝像頭,融合物體檢測與智能抓取策略及機(jī)械臂運動規(guī)劃等相關(guān)技術(shù),完成桌面上雜亂物體的識別和智能抓取,成功將所有物體抓取到正確位置。
?

?
通過本次比賽,上海交大“KaiBot”智能機(jī)器人團(tuán)隊在國際舞臺上展示了在機(jī)器視覺與機(jī)器人智能抓取方面的研究水平,獲得了來自麻省理工學(xué)院、加州大學(xué)伯克利分校、澳大利亞機(jī)器人視覺中心等高校和企業(yè)專家學(xué)者的肯定。目前,該團(tuán)隊正針對更復(fù)雜任務(wù)的機(jī)器人智能抓取操作原理和技術(shù)方法開展研究,并嘗試拓展至人機(jī)協(xié)同接觸操作領(lǐng)域。
Copyright ?2019. 上海交通大學(xué)機(jī)械與動力工程學(xué)院
學(xué)生工作辦公室版權(quán)所有
地址:上海市東川路800號上海交通大學(xué)閔行校區(qū)機(jī)械與動力工程學(xué)院




