
近日,上海交通大學(xué)機(jī)械與動力工程學(xué)院重大裝備設(shè)計與控制工程研究所郭為忠教授團(tuán)隊在Mechanism and Machine Theory上發(fā)表了題為“Updating structural synthesis methodology of mechanisms: from kinematic geometry to kinematic geometry accompanied with statics”的研究論文。該團(tuán)隊突破了目前國際上機(jī)構(gòu)拓?fù)渚C合理論方法僅考慮運動幾何約束的局限,首次在機(jī)構(gòu)構(gòu)型設(shè)計中引入力流傳遞特征,系統(tǒng)建立了同時考慮幾何約束和傳力特征的機(jī)構(gòu)拓?fù)渚C合新方法,更適合考慮機(jī)-環(huán)境存在力交互作用的現(xiàn)代機(jī)械裝備創(chuàng)新設(shè)計的需要。重大裝備設(shè)計與控制工程研究所博士研究生韓有承為論文第一作者,郭為忠教授為通訊作者。
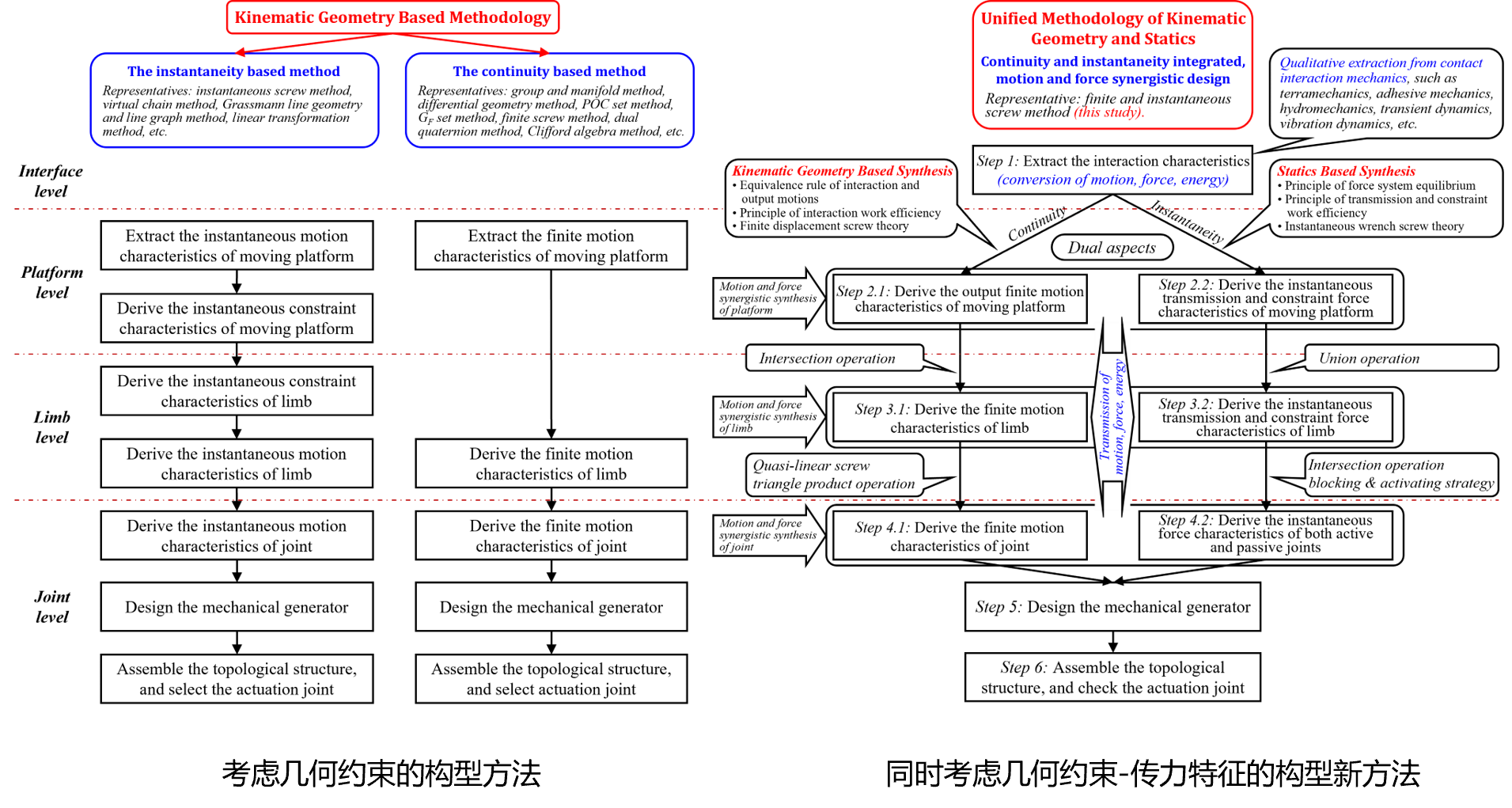
論文以著陸外星的可移動式新型著陸器重大需求為背景,聚焦現(xiàn)代裝備創(chuàng)新研發(fā)過程的機(jī)構(gòu)構(gòu)型綜合階段,需要同時考慮運動特性要求和傳力性能要求,而目前的機(jī)構(gòu)構(gòu)型理論僅考慮運動特性要求,未考慮傳力性能要求的問題。論文回顧了1983年以來機(jī)器人機(jī)構(gòu)學(xué)領(lǐng)域發(fā)展的運動幾何學(xué)體系下的11種拓?fù)渚C合方法,針對僅考慮機(jī)構(gòu)運動特征而忽視傳力特征、做功能效以及機(jī)-環(huán)境力交互特性等不足,創(chuàng)新性提出兼顧運動幾何學(xué)與力學(xué)的運動特征與傳力特性雙軌并重、協(xié)同綜合的整機(jī)構(gòu)型設(shè)計思想,揭示了拓?fù)渚C合層面力流及其對運動做功效率在平臺、支鏈和關(guān)節(jié)層面作用與傳遞規(guī)律,建立了考慮幾何約束和傳力特征的拓?fù)渚C合新方法,開創(chuàng)了面向機(jī)-環(huán)境力交互的共融機(jī)器人構(gòu)型設(shè)計新范式。
論文將機(jī)構(gòu)視為幾何約束、力流通道和能量網(wǎng)絡(luò)的有機(jī)統(tǒng)一體,適用于滿足期望運動外,還需具備大承載、強(qiáng)剛度、高功效需求等力學(xué)交互場景的拓?fù)渚C合,兼具代數(shù)符號化解析和幾何直觀化表征等特點。為了建立該方法,論文首先發(fā)展了有限與瞬時旋量理論,給出內(nèi)嵌有限運動算子的瞬時力旋量修正表示及基于此的虛功原理。然后,引入旋量互易關(guān)系和互易積非零關(guān)系,揭示出力交互/傳遞/約束功效優(yōu)化原理,以及交互/傳遞/約束力旋量系平衡原理;構(gòu)建了基于交互運動、力和做功效率推演確定輸出有限運動特征、傳遞力特征和約束力特征的公理化方法;構(gòu)建了基于輸出端特征(運動、力、能效)確定支鏈特征及其Motion Generator和裝配幾何條件的公理化方法。
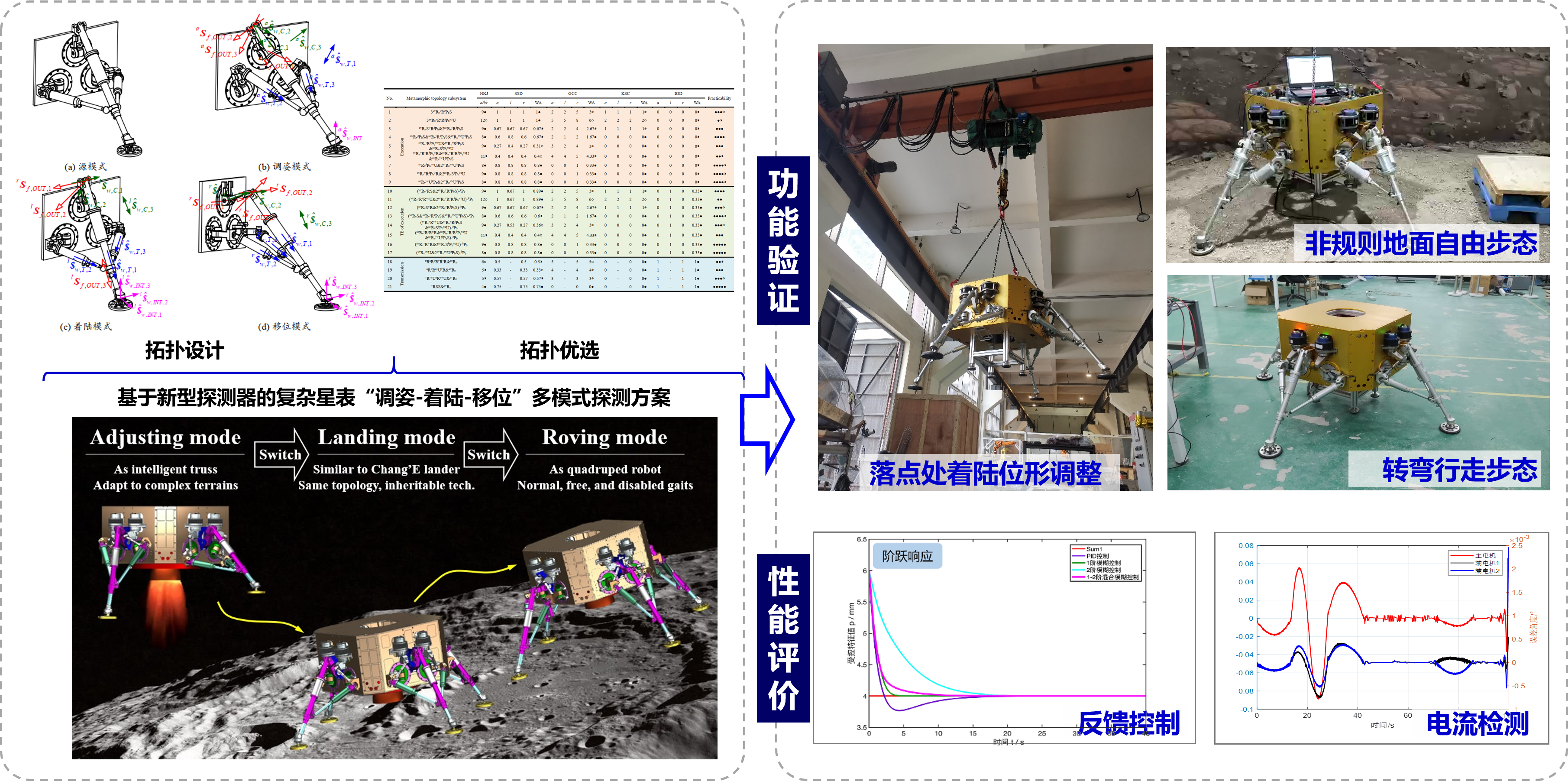
運用所建立的方法,論文提出了面向工程需求的調(diào)姿-著陸-移位多模式可重構(gòu)新型探測器拓?fù)湎到y(tǒng)設(shè)計架構(gòu),優(yōu)選出實驗樣機(jī)構(gòu)型,研制了實驗樣機(jī)并開展了實驗驗證研究,實現(xiàn)了在構(gòu)型設(shè)計階段即能保障有效提升著陸瞬時沖擊負(fù)荷能力和重載移位行走能力。
Mechanism and Machine Theory創(chuàng)刊于1970年,是IFToMM(國際機(jī)構(gòu)與機(jī)器科學(xué)聯(lián)合會)會刊,專注于發(fā)布機(jī)構(gòu)與機(jī)器科學(xué)領(lǐng)域的高質(zhì)量研究論文,在國際機(jī)構(gòu)與機(jī)器科學(xué)領(lǐng)域享有盛譽(yù)。
郭為忠教授團(tuán)隊致力于解決現(xiàn)代機(jī)構(gòu)學(xué)與并聯(lián)機(jī)器人領(lǐng)域的前沿基礎(chǔ)性科學(xué)問題及關(guān)鍵技術(shù),旨在通過基礎(chǔ)理論突破推動航空航天等相關(guān)工程應(yīng)用領(lǐng)域的重大裝備創(chuàng)新發(fā)展。近年來在Mechanism and Machine Theory,ASME Journal of Mechanisms and Robotics,ASME Journal of Mechanical Design,IEEE Transactions on Robotics等國際期刊上發(fā)表系列學(xué)術(shù)論文。
論文鏈接:https://www.sciencedirect.com/science/article/pii/S0094114X23002872



上海交大
機(jī)械動力學(xué)院



上海交大
機(jī)動本科教務(wù)辦



SJTU機(jī)動研教辦



上海交大
機(jī)動校友辦



上海交大MEM



SJTUME基礎(chǔ)實驗與創(chuàng)新實踐



SJTUME錘錘



上海交大
機(jī)動研究生會



ME微紅旗



ME礪遠(yuǎn)學(xué)術(shù)



SJTUME職業(yè)發(fā)展中心
 學(xué)院OA系統(tǒng)
學(xué)院OA系統(tǒng) jAccount登錄
jAccount登錄



 地址:上海市東川路800號上海交通大學(xué)閔行校區(qū)機(jī)械與動力工程學(xué)院
地址:上海市東川路800號上海交通大學(xué)閔行校區(qū)機(jī)械與動力工程學(xué)院 郵編:200240
郵編:200240 Email:sjtume@sjtu.edu.cn
Email:sjtume@sjtu.edu.cn