
近日,上海交通大學(xué)機械與動力工程學(xué)院前瞻交叉研究中心的錢小石教授團隊與香港大學(xué)機械工程系Nicholas X. Fang教授合作開發(fā)了一種整體的、刺激響應(yīng)的趨光軟體載具(PTV),具有類似水母的對稱性幾何結(jié)構(gòu),能夠迅速的朝向任意方向的穩(wěn)定光源自主運動,并根據(jù)光源方向的變化,實時準確追蹤。該研究工作以題為“Self-regulated underwater phototaxis of photoresponsive hydrogel-based phototactic vehicle”的研究論文發(fā)表在《Nature Nanotechnology》上。博士研究生侯國棟為該論文的第一作者,錢小石教授為通訊作者,香港大學(xué)Nicholas X. Fang教授為共同通訊作者。
在海洋中,有一些漂浮的小生物能感知到水中光線的變化。它們可以根據(jù)光線的強弱,自主調(diào)整自己的運動,以便捕捉到食物、尋找繁殖的機會,并遠離危險。這些生物的調(diào)整運動有很多種,包括趨光性、趨渦性、趨流性和趨化性等,讓它們可以根據(jù)環(huán)境的變化,自主選擇移動的方向。這種能力讓它們看起來有點像在做“決策”。要實現(xiàn)這種“決策”,生物體需要在受到刺激時產(chǎn)生驅(qū)動力,并在合適的時候停止驅(qū)動。目前,人類制造的一些人工系統(tǒng)也有類似的反饋控制功能,但這些功能往往需要依賴預(yù)先編程的電子電路控制,或者人為的遙控操作。 然而,如果不依賴電子控制或人工干預(yù),僅僅使用均勻的材料,我們還很難實現(xiàn)像這些小生物一樣,可以無拖線、自主決策地在整個空間內(nèi)進行趨光性運動。這個領(lǐng)域仍有許多挑戰(zhàn)等待我們?nèi)タ朔脱芯俊?/span>

趨光性軟體載具的水下操縱
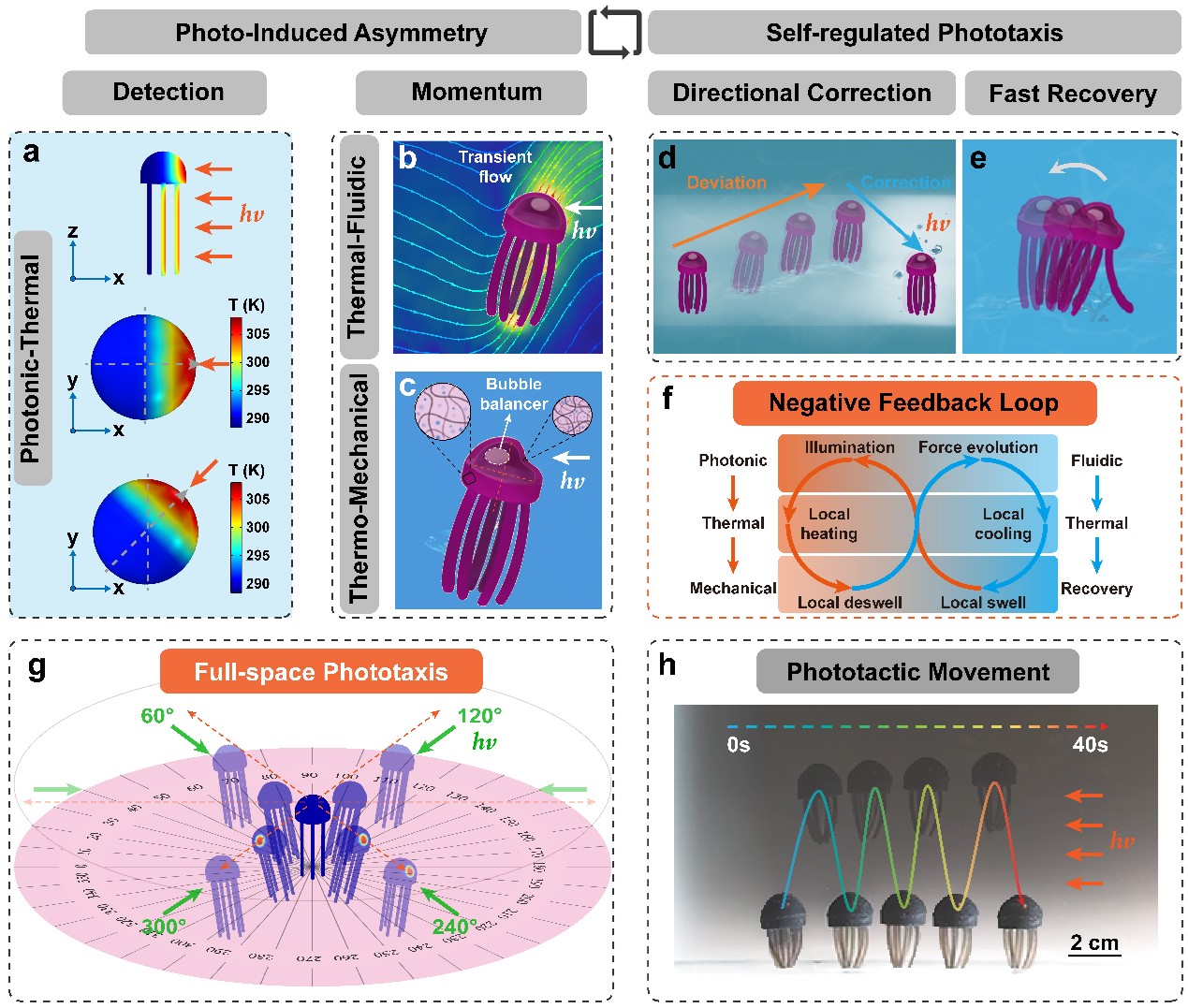
圖1:通過自發(fā)誘導(dǎo)非對稱調(diào)節(jié)實現(xiàn)全空間趨光性的示意圖
在光照條件下,PTV利用定向光子能量引發(fā)溫度、流場和幾何形態(tài)上的非對稱性。光子誘導(dǎo)的多場可逆非對稱性使PTV能夠?qū)θ魏稳肷浞较蜃龀鲰憫?yīng)(圖1a),從而產(chǎn)生可提供動力的向光流體運動(圖1b),并自發(fā)地采取最佳姿態(tài)進行低阻力的向光游動(圖1c)。為了避免因受熱表面引起的上升流而產(chǎn)生的偏移運動,PTV能夠自適應(yīng)地增強受熱表面的對流換熱,從而為糾正方向偏差提供負反饋(圖1d)。此智能系統(tǒng)采用一種快速驅(qū)動和恢復(fù)的刺激響應(yīng)水凝膠為基質(zhì)材料,對來自不同方向的光照能做出快速響應(yīng)(圖1e)。高靈敏度和可逆的化學(xué)機械反應(yīng)使其能夠在溫和的光照條件下(<1 Sun),實現(xiàn)對全空間的向光性和精準操縱(見圖1g、h)。
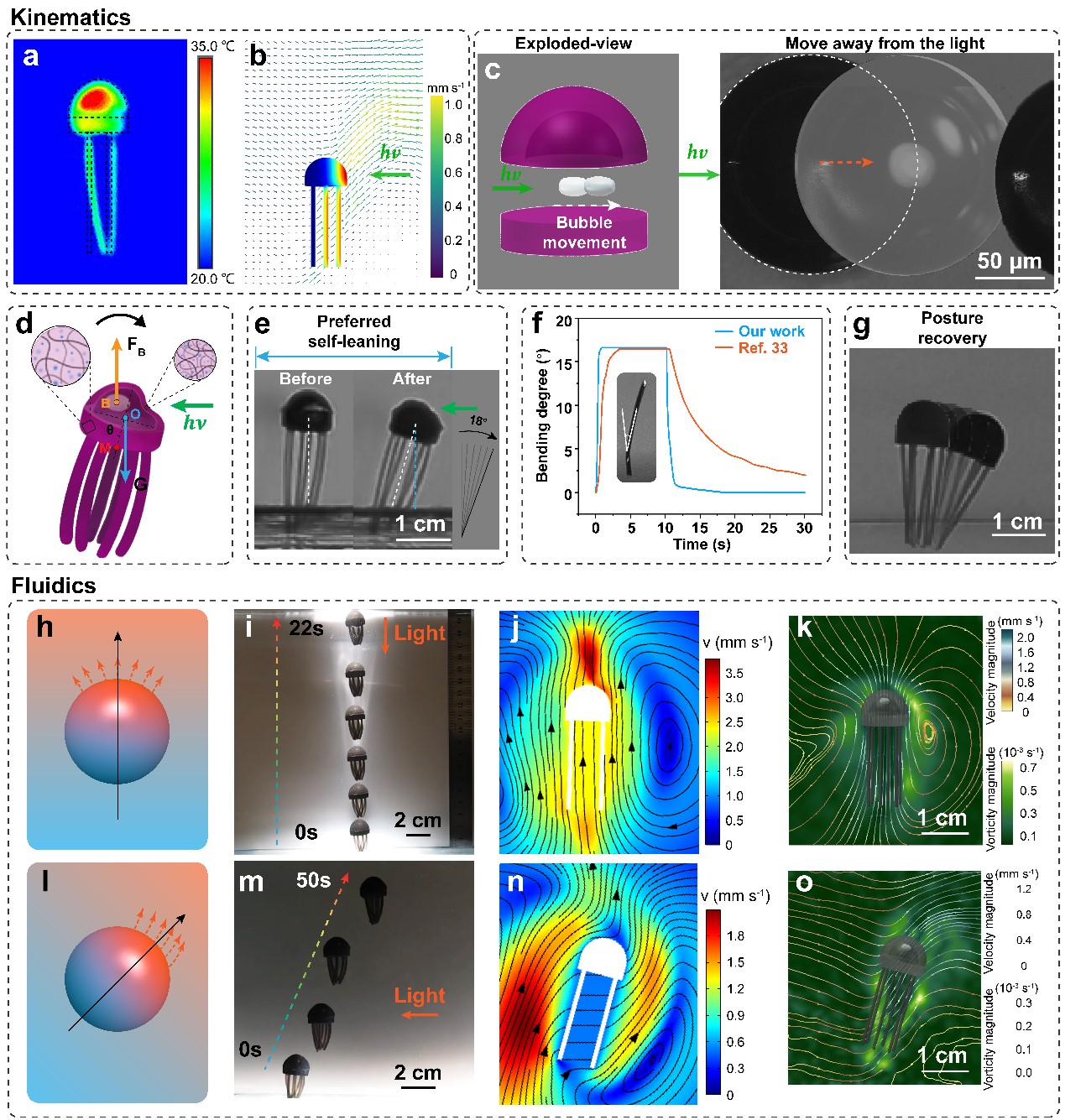
圖2:光-熱-流體引導(dǎo)的PTV運動
一旦受到光照,PTV的三種非對稱特性同時被激發(fā),從而形成新的溫度梯度、流場梯度和機械應(yīng)變梯度(圖2a-d)。為了實現(xiàn)長期且對等的驅(qū)動和恢復(fù),作者通過控制材料制備的化學(xué)和物理過程來改變凝膠的孔隙度。在16°的角度下,冰模板輔助下混合交聯(lián)的水凝膠柱在不到一秒的時間內(nèi)完全恢復(fù)原狀(圖2f),其恢復(fù)速度與其收縮速度相當,比之前報道的最佳值快了30倍。PTV中內(nèi)嵌的光熱響應(yīng)材料r-GO和AuNPs有效地將光能轉(zhuǎn)化為熱能,當從上方照射光線時,PTV迅速上升至水面(圖2i)。表面的溫升引發(fā)向上的對流,傳遞了方向信息(圖2j)。PIV測試結(jié)果與CFD模擬結(jié)果相當吻合(圖2j、k)。水平光照時,右側(cè)的水平輻照引起溫度和流場的非對稱性,在光照一側(cè)產(chǎn)生更高的溫度和流速(圖2o)。被加熱的表面反映了入射光的方向信息,但也會引發(fā)上升流,使PTV向右上方移動(圖2m)。CFD和PIV結(jié)果(圖2n、o)表明,流場中的大部分是向上對流,這可能導(dǎo)致水平光線照射時的準確性降低(圖2m)。
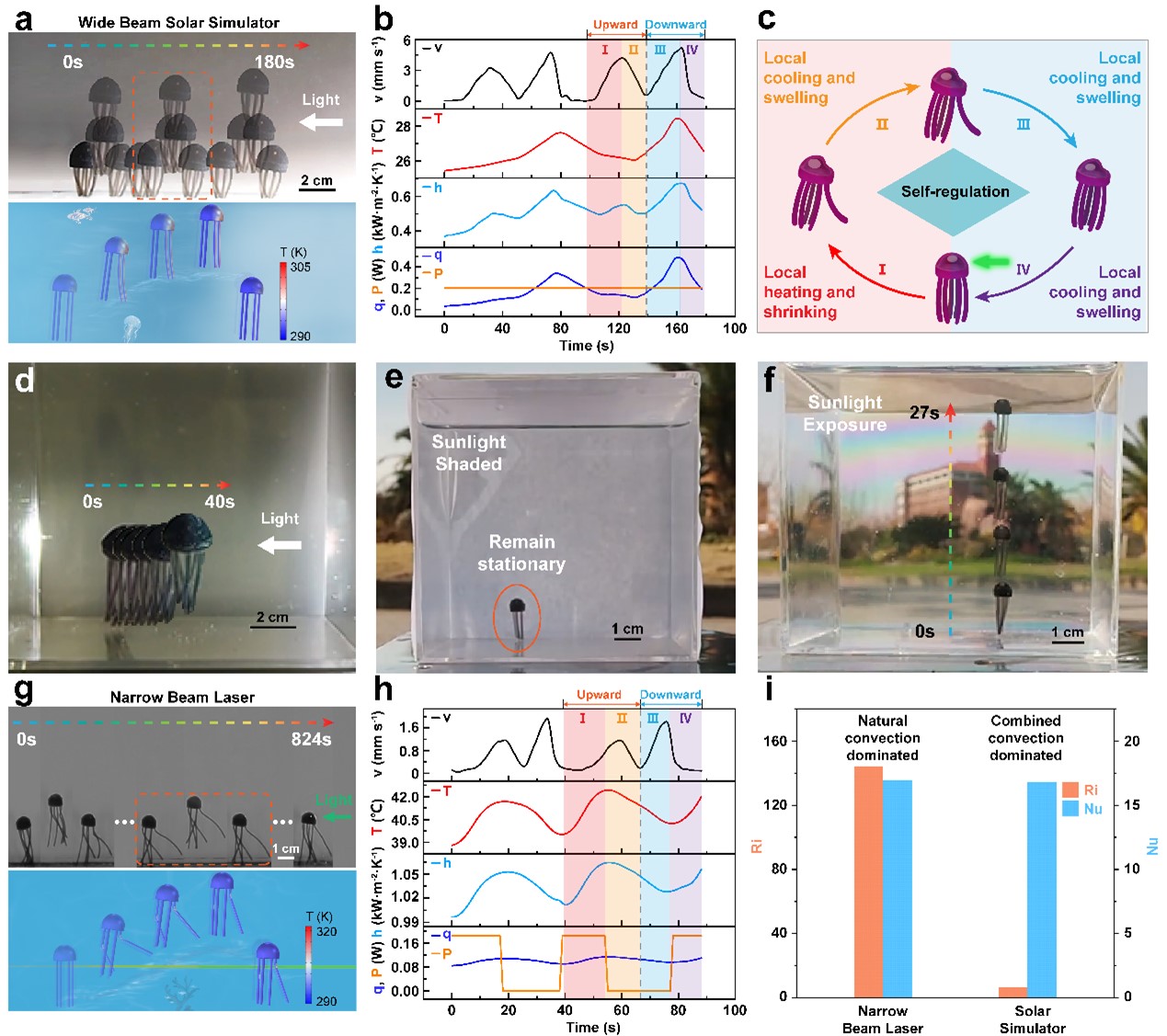
圖3:通過自我調(diào)節(jié)誘導(dǎo)的非對稱實現(xiàn) PTV 的趨光性
在白光照射下,與r-GO耦合的PTV表現(xiàn)出自主向上和向右的躍遷,然后回到底部,實現(xiàn)了水平趨光性(見圖3a)。分析結(jié)果表明,PTV加速時遇到環(huán)境冷流體的速度更快,隨之而來的冷卻終止了上升流,使PTV重新回到正常運動軌跡。大量的對流傳熱向環(huán)境中釋放的熱量(q=-hA(T_s-T_f ))超過了輸入光子的功率(P),因此引發(fā)了表面溫度的振蕩,從而構(gòu)建了負反饋回路(圖3b,3c)。在陽光照射下,PTV始終停留在容器底部(圖3e)。一旦受到光照,PTV立即開始游向水面(圖3f)。與AuNPs結(jié)合的PTV同樣也能夠向光源方向跳躍(圖3g)。由于光束寬度相對較窄,上升的PTV會通過遠離照明的方式降低表面溫度,從而完成負反饋循環(huán)。作者定量研究了無量綱理查森數(shù)(Ri=Gr/Re2)來探究自然對流和強制對流的相對權(quán)重。盡管在兩種情況下努塞爾特數(shù)(Nu=16.9)相當,但激光照射時的Ri為144.0(?1),從而證實了自然對流在冷卻中占主導(dǎo)地位。而在寬光束照射下,Ri=6.8,說明速度誘導(dǎo)的混合對流在自適應(yīng)調(diào)節(jié)中扮演重要角色(圖3i)。
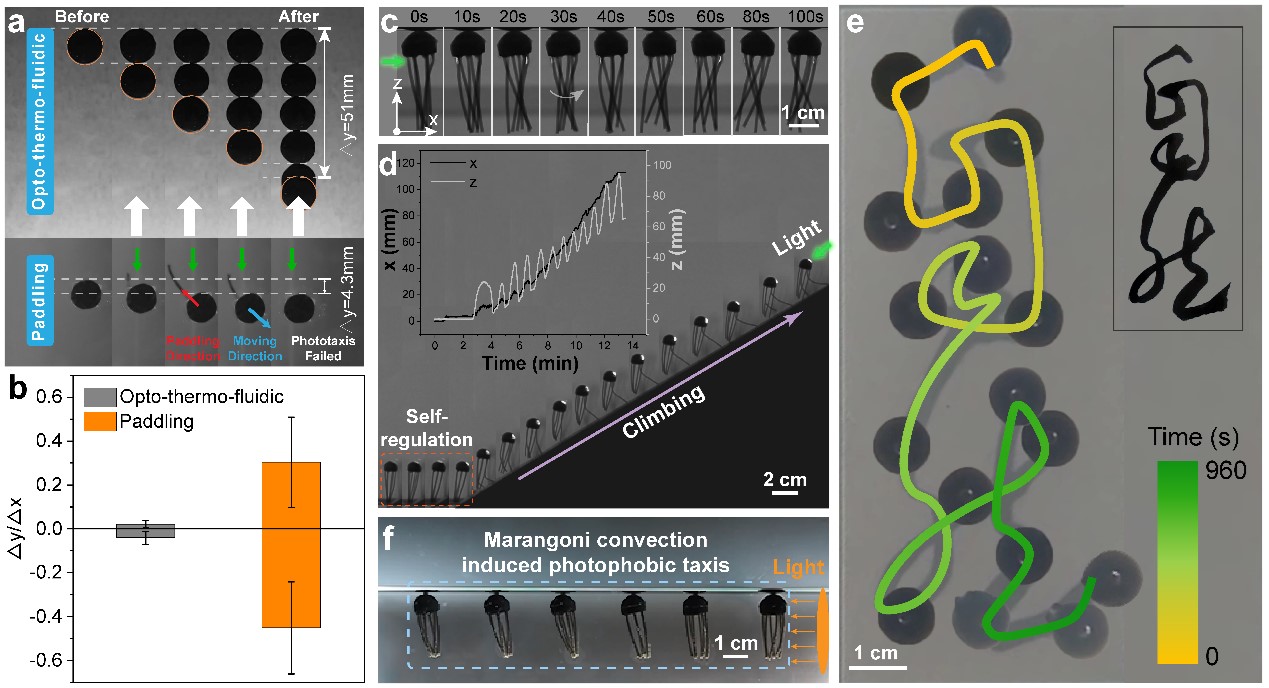
圖4:PTV的水下操縱
槳狀觸手獲取動量時容易與激光束錯位,由光-熱-流體驅(qū)動的PTV在較長距離上表現(xiàn)出魯棒的趨光性卻幾乎沒有方向偏差(圖4a、b)。將六根偏離中心位置的觸手巧妙地級聯(lián),PTV能夠自適應(yīng)的旋轉(zhuǎn)前進(圖4c)。響應(yīng)性觸手會向光源方向彎曲并抵消傾覆力矩,從而在PTV爬上坡道時提供額外的穩(wěn)定性(圖4d)。由于聚合物基體自發(fā)誘導(dǎo)的非對稱性和快速恢復(fù)特性,PTV的定向響應(yīng)是即時的。PTV具備靈活操控的能力的同時還具有出色的方向和位置分辨率。在恒定光源的連續(xù)變化角度下,PTV可以完美地模仿中國書法漢字“自然”(圖4e)中復(fù)雜的筆畫運動。與在水面浸沒時的趨光性不同,由于馬蘭戈尼對流效應(yīng),當PTV浮在氣水界面上時,會避開光線(圖4f)。
在這項研究中,團隊通過調(diào)整水凝膠納米復(fù)合材料內(nèi)部的光-熱-機械-流體相互作用,成功實現(xiàn)了人工趨光性。這種趨光性不依賴于對光源或邊界條件的特殊要求,通過建立負反饋回路來調(diào)控水凝膠系統(tǒng)的運動,PTV能夠在沒有明顯遠距離偏離的情況下追蹤光線,并能夠在適度而持續(xù)的光照下精確地轉(zhuǎn)向復(fù)雜的路徑。考慮到PTV僅具有一個負反饋回路,因此探索涉及更多控制回路的策略可能會使這種不受約束、不需要電子元件、能夠自給自足能源的材料系統(tǒng)具備多功能的調(diào)節(jié)行為。
該研究依托材料科學(xué)、熱科學(xué)、光學(xué)、流體力學(xué)、機械制造等多個領(lǐng)域的交叉合作,上海交通大學(xué)機械與動力工程學(xué)院的孟光教授、陳江平教授、吳亞東副研究員、汪華苗副教授、楊光副教授、劉振宇副教授以及南方科技大學(xué)機械與能源工程系的葛锜副教授也參與了該項研究。研究工作得到了國家重點研發(fā)計劃項目,國家自然科學(xué)基金項目,上海市自然科學(xué)基金項目,機械系統(tǒng)與振動全國重點實驗室開放課題等項目的支持。
 學(xué)院OA系統(tǒng)
學(xué)院OA系統(tǒng) jAccount登錄
jAccount登錄




































 地址:上海市東川路800號上海交通大學(xué)閔行校區(qū)機械與動力工程學(xué)院
地址:上海市東川路800號上海交通大學(xué)閔行校區(qū)機械與動力工程學(xué)院 郵編:200240
郵編:200240 Email:sjtume@sjtu.edu.cn
Email:sjtume@sjtu.edu.cn