近日,“申昊杯”第五屆中國研究生機器人創(chuàng)新設(shè)計大賽全國總決賽圓滿落幕,我院學(xué)子獲二等獎、三等獎各一項。
二等獎項目簡介:
項目名稱:新型腿式可移動著陸器
團隊成員:韓有承,李子岳
指導(dǎo)教師:郭為忠
項目介紹:

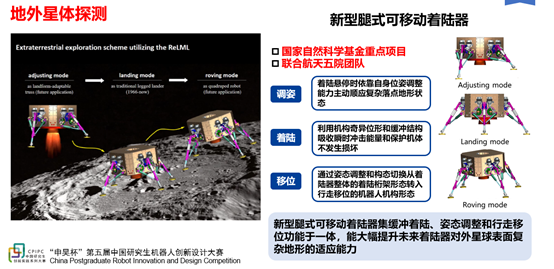
為應(yīng)對錯綜復(fù)雜的地外星體探索環(huán)境,項目提出一種“調(diào)姿-緩沖著陸-移位”一體化的新型腿式步行著陸器,該機器人著陸懸停時依靠自身位姿調(diào)整能力,主動順應(yīng)復(fù)雜落點地形狀態(tài),著陸時利用機構(gòu)奇異位形和緩沖結(jié)構(gòu),吸收瞬時沖擊能量,并保護機體不發(fā)生損壞,再通過姿態(tài)調(diào)整和構(gòu)態(tài)切換,從著陸器整體的著陸桁架形態(tài)轉(zhuǎn)入行走移位的機器人機構(gòu)形態(tài),大幅提升未來著陸器對外星球表面復(fù)雜地表的適應(yīng)能力。
三等獎項目簡介:
項目名稱:支持多模式曲面分層的新型回轉(zhuǎn)式3D打印機
團隊成員:朱高晗、陳昊、林恒茂
指導(dǎo)教師:郭為忠
項目介紹:

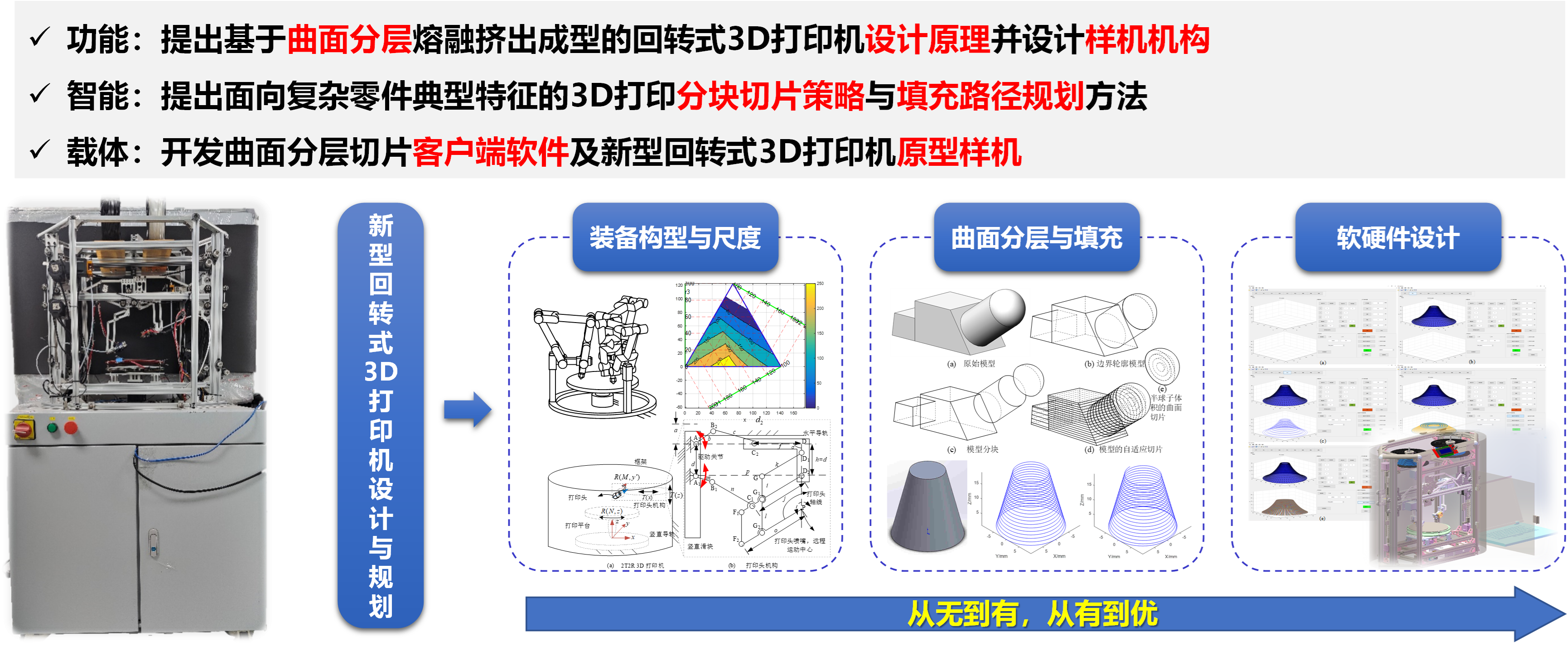
在增材制造(3D打印)領(lǐng)域,曲面打印能夠有效緩解甚至消除傳統(tǒng)平面打印中存在的階梯效應(yīng)、各向異性以及支撐結(jié)構(gòu)去除難等問題,但是發(fā)展這項技術(shù)需要研發(fā)具備曲面打印能力的多自由度3D打印裝備和曲面分層切片,及其路徑規(guī)劃算法。項目提出了自適應(yīng)切片策略及其填充路徑規(guī)劃方法,并開發(fā)了支持曲面分層的客戶端軟件;提出了曲面打印裝備“功能-構(gòu)型-結(jié)構(gòu)”創(chuàng)新設(shè)計的框架,并設(shè)計了新型回轉(zhuǎn)式3D打印機原型樣機,為現(xiàn)代機器設(shè)計理論與曲面打印技術(shù)的集成提供了新場景。
“中國研究生機器人創(chuàng)新設(shè)計大賽”是“中國研究生創(chuàng)新實踐系列大賽”主題賽事之一,由教育部學(xué)位管理與研究生教育司指導(dǎo),中國學(xué)位與研究生教育學(xué)會、中國科協(xié)青少年科技中心主辦,以“制造強國”國家戰(zhàn)略需求為導(dǎo)向,旨在培養(yǎng)機器人領(lǐng)域國家急需高水平科技創(chuàng)新人才,提升研究生的機器人創(chuàng)新設(shè)計能力,服務(wù)機器人產(chǎn)業(yè)生態(tài)體系建設(shè),推動機器人科技與產(chǎn)業(yè)的創(chuàng)新發(fā)展。本次大賽共有來自234家單位的1177支隊伍參加,288支隊伍入圍決賽,評選出冠、亞、季軍各1項,一等獎27項,二等獎86項,三等獎175項。
 學(xué)院OA系統(tǒng)
學(xué)院OA系統(tǒng) jAccount登錄
jAccount登錄





































 地址:上海市東川路800號上海交通大學(xué)閔行校區(qū)機械與動力工程學(xué)院
地址:上海市東川路800號上海交通大學(xué)閔行校區(qū)機械與動力工程學(xué)院 郵編:200240
郵編:200240 Email:sjtume@sjtu.edu.cn
Email:sjtume@sjtu.edu.cn