搜索:

近日,機(jī)械與動(dòng)力工程學(xué)院振動(dòng)、沖擊、噪聲研究所張文明教授團(tuán)隊(duì)在學(xué)術(shù)期刊The Innovation(影響因子33.1)上發(fā)表了題為“An intelligent spinal soft robot with self-sensing adaptability”的研究論文,提出了一種具有自感知-適應(yīng)能力的軟體機(jī)器人,利用正逆壓電效應(yīng),設(shè)計(jì)了具有“傳感-驅(qū)動(dòng)”功能一體化集成的仿生脊椎,賦予了軟體機(jī)器人一定的運(yùn)動(dòng)能力和對(duì)不同環(huán)境的感知能力。博士生鞏守祿和房付熠為論文第一作者,易志然助理研究員、邵磊副教授和張文明教授是共同通訊作者。
環(huán)境適應(yīng)性是軟體機(jī)器人實(shí)現(xiàn)高效運(yùn)動(dòng)的重要特征。然而,現(xiàn)有軟體機(jī)器人的感知系統(tǒng)與驅(qū)動(dòng)系統(tǒng)相對(duì)獨(dú)立,存在本征的感驅(qū)信息誤差,使得兩者協(xié)同控制效果受限。設(shè)計(jì)和開(kāi)發(fā)一種像生物體一樣具有獨(dú)立決策和自發(fā)調(diào)節(jié)能力的智能軟體機(jī)器人仍頗具挑戰(zhàn)。針對(duì)上述問(wèn)題,課題組仿照生物體運(yùn)動(dòng)器官—脊椎和軟組織肌肉,利用壓電效應(yīng)的可逆性,設(shè)計(jì)了感驅(qū)一體的仿生脊椎,利用氣動(dòng)折紙驅(qū)動(dòng)器作為人工肌肉,實(shí)現(xiàn)了一種具有自我感知適應(yīng)能力的智能軟體機(jī)器人。該仿生脊椎利用可逆的物理效應(yīng),能夠?yàn)檐涹w機(jī)器人提供軀干支撐、驅(qū)動(dòng)輔助和感知調(diào)節(jié)等功能。
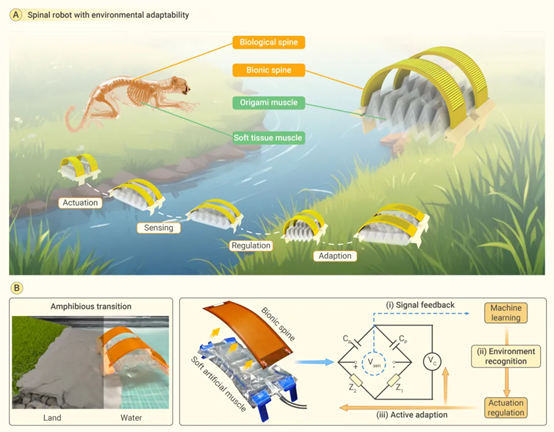
具有“環(huán)境感知—自適應(yīng)”能力的仿生脊椎軟體機(jī)器人
在“自感知—適應(yīng)”能力的作用下,仿生脊椎軟體機(jī)器人能夠流暢地完成從環(huán)境識(shí)別、自我決策到主動(dòng)調(diào)節(jié)的閉環(huán)工作流程,從而高效地完成任務(wù)。為了驗(yàn)證仿生脊椎的可靠性,本文設(shè)計(jì)了一個(gè)具有全向運(yùn)動(dòng)以及自我避障意識(shí)的軟體兩棲機(jī)器人。通過(guò)調(diào)節(jié)機(jī)器人的運(yùn)動(dòng)姿態(tài)以及人工肌肉間的協(xié)同驅(qū)動(dòng)能夠控制機(jī)器人實(shí)現(xiàn)前進(jìn)、后退以及轉(zhuǎn)向運(yùn)動(dòng)。機(jī)器人展示出對(duì)于障礙物的感知與規(guī)避能力,以及在水陸兩棲多地形任務(wù)中的較高效率,驗(yàn)證了仿生脊椎設(shè)計(jì)的可拓展性以及功能元件和系統(tǒng)的高簡(jiǎn)潔性。
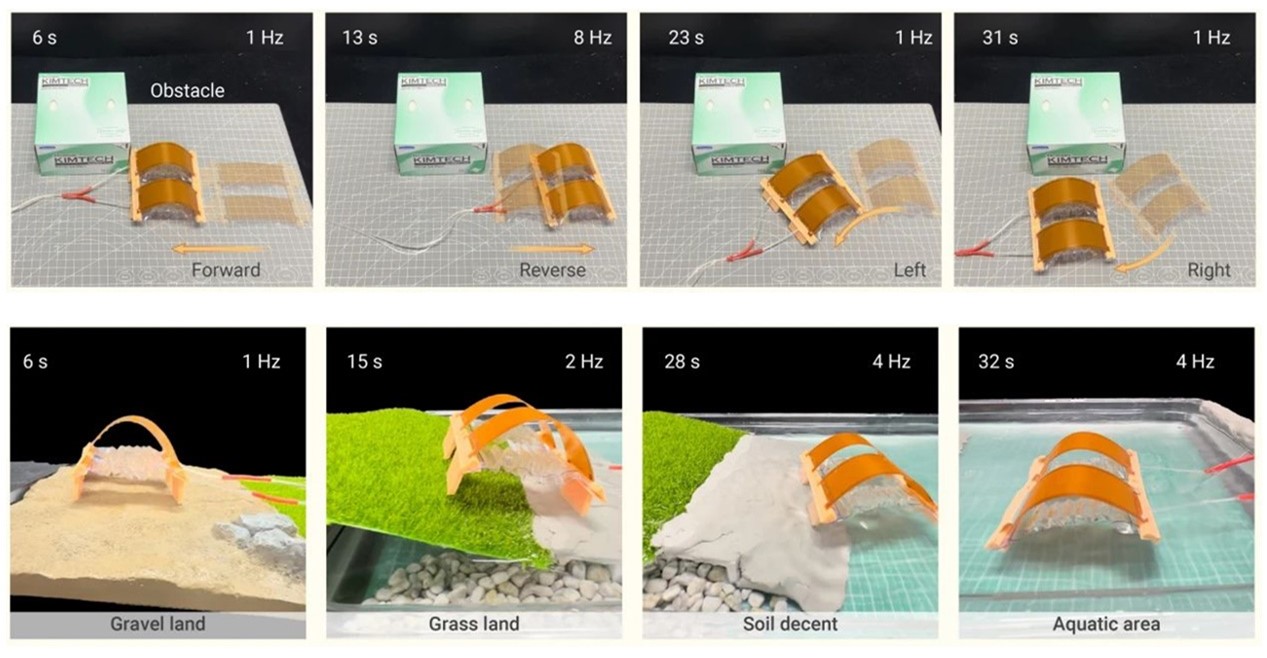
仿生脊椎軟體機(jī)器人執(zhí)行避障及水陸兩棲多地形任務(wù)
具有協(xié)同效應(yīng)的感驅(qū)一體仿生脊椎不僅最大程度上減少了系統(tǒng)冗余,還構(gòu)建了從感知識(shí)別到?jīng)Q策響應(yīng)之間的橋梁。該研究能有效激發(fā)未來(lái)高智能、全天候、低成本的智能軟體機(jī)器人研發(fā)。
該研究獲得了國(guó)家自然科學(xué)基金、上海市科技創(chuàng)新行動(dòng)計(jì)劃等課題的資助。
論文鏈接:https://doi.org/10.1016/j.xinn.2024.100640



上海交大
機(jī)械動(dòng)力學(xué)院



上海交大
機(jī)動(dòng)本科教務(wù)辦



SJTU機(jī)動(dòng)研教辦



上海交大
機(jī)動(dòng)校友辦



上海交大MEM



SJTUME基礎(chǔ)實(shí)驗(yàn)與創(chuàng)新實(shí)踐



SJTUME錘錘



上海交大
機(jī)動(dòng)研究生會(huì)



ME微紅旗



ME礪遠(yuǎn)學(xué)術(shù)



SJTUME職業(yè)發(fā)展中心
 學(xué)院OA系統(tǒng)
學(xué)院OA系統(tǒng) jAccount登錄
jAccount登錄



 地址:上海市東川路800號(hào)上海交通大學(xué)閔行校區(qū)機(jī)械與動(dòng)力工程學(xué)院
地址:上海市東川路800號(hào)上海交通大學(xué)閔行校區(qū)機(jī)械與動(dòng)力工程學(xué)院 郵編:200240
郵編:200240 Email:sjtume@sjtu.edu.cn
Email:sjtume@sjtu.edu.cn